
Методические указания предназначены для студентов специальности "Электропривод и автоматизация промышленных установок"
| Вид материала | Методические указания |
Содержание2. Содержание и объем курсового проекта 3. Исходные данные для проектирования 4. Методические указания по проектированию |
- Методические рекомендации и указания по изучению дисциплины Автоматизированный электропривод, 70.72kb.
- Методические указания к выполнению расчётно графической работы №1 для студентов специальности, 243.93kb.
- План час. Сроки контроля Для студентов специальности 140604. 65 «Электропривод и автоматика, 154.73kb.
- Т. В. Фёдоров методические указания по технологической практике студентов IV курса, 107.4kb.
- Методические указания для выполнения лабораторных работ Новосибирск 2009, 437.08kb.
- Физические основы электроники, 499.24kb.
- Методические указания к проведению практических занятий по курсу «Архитектура гражданских, 272.14kb.
- Рабочая программа учебной дисциплины ф тпу 1-21/01 Федеральное агентство по образованию, 350.51kb.
- Электропривод и автоматика промышленных установок и технологических комплексов, 153.11kb.
- Методические указания к практическим занятиям и самостоятельной работе студентов Омск-2009, 848.08kb.
1. ОБЩИЕ ПОЛОЖЕНИЯ
Настоящие методические указания предназначены для студентов специальности "Электропривод и автоматизация промышленных установок", выполняющих курсовой проект по системам управления электроприводами.
Цель курсового проекта - закрепить и расширить теоретические знания, полученные при изучении курса "Системы управления электроприводами"; развить самостоятельность в принятии решений и приобрести навыки при разработке конкретных задач; ознакомить студентов с существующими системами автоматизированного электропривода, изучить каталоги, государственные стандарты, справочную литературу.
Важнейшей тенденцией в развитии автоматизированных систем управления электроприводами /АСУ ЭП/ является постоянное повышение их эффективности; при этом, если в прежние годы наибольший эффект достигался за счет улучшения параметров электродвигателей и наиболее полного использования регулировочных свойств электропривода, то сейчас и в ближайшие годы значительного повышения технических параметров АСУ ЭП можно ожидать, в основном, от применения новых систем управления, в частности, систем со статическими преобразователями на тиристорах. Поэтому в курсовом проекте по системам управления электроприводами объектом расчетов и исследований является, как правило, АСУ ЭП с тиристорным выпрямителем, тиристорным преобразователем частоты или тиристорным коммутатором.
^ 2. СОДЕРЖАНИЕ И ОБЪЕМ КУРСОВОГО ПРОЕКТА
Куроовой проект содержит пояснительную записку объемом до 50 страниц формата А4 и 1-2 листа чертежей формата A1
Далее приводится перечень вопросов, изучение и разработка которых должны быть отражены в пояснительной записке /в скобках указаны проценты, ориентировочно характеризующие трудоемкость каждого вопроса/:
1/ введение /3 %/;
2/ выбор двигателя /3 %/;
3/ выбор принципиальной схемы силовых цепей и разработка охемы цепей управления /7 %/;
4/ расчет параметров и выбор основных силовых элементов системы электропривода /10 %/;
5/ составление структурной схемы АСУ ЭП и определение параметров ее отдельных звеньев /12 %/;
6/ расчет коэффициентов и параметров цепей жестких обратных связей /10 %/;
7/ расчет и построение статических характеристик /10 %/;
8/ расчет параметров и выбор корректирующих устройств /8 %/;
9/ анализ динамических режимов /12 %/;
10/ выполнение специального задания - задания, по НИРС /10 %/;
11/ разработка принципиальной схемы АСУ ЭП с устройствами защиты, блокировки и сигнализации /5 %/;
12/ выбор аппаратуры и составление спецификации на электрооборудование /7 %/;
13/ заключение /3%/.
В зависимости от особенностей темы, исходных данных и пр. перечень вопросов и объем их проработки по усмотрению руководителя может быть изменен, некоторые из указанных вопросов могут быть опущены или заменены другими. Например, могут решаться такие вопросы, как оценка надежности системы, технико-экономический расчет эффективности проектируемой АСУ ЭП, программная реализация регуляторов о помощью микропроцессорных средств и др.
^ 3. ИСХОДНЫЕ ДАННЫЕ ДЛЯ ПРОЕКТИРОВАНИЯ
В задании на курсовой проект приводятся следующие основные исходные данные:
1/система электропривода и ее структура, Например, система тиристорный преобразователь частоты - асинхронный двигатель, система тиристорный преобразователь - двигатель с последовательной коррекцией при одно-зонном регулировании скорости и т.п.;
2/ тип электропривода: реверсивный, нереверсивный;
3/ мощность и скорость вращения;
4/ напряжение /линейное/ питающей сети Uc и возможные пределы его колебаний ±ΔU; .
5
 / диапазон регулирования скорости. ,где
/ диапазон регулирования скорости. ,гдеωmax иωmin - соответственно максимальная и минимальная угловая
скорость вращения при номинальной нагрузке электродвигателя;
6/ изменение момента нагрузки на валу электродвигателя в относительных единицах ΔМс* ; в дальнейшем будем полагать, что нагрузка изменяется- от величины, равной номинальному моменту электродвигателя, в сторону уменьшений на величину ΔМс* ;
7/ точность поддержания скорости, оцениваемая ошибкой регулирования, %;
 где Δω- абсолютное изменение угловой скорости при изменении нагрузки на валу электродвигателя от номинальной Мн до минимальной
где Δω- абсолютное изменение угловой скорости при изменении нагрузки на валу электродвигателя от номинальной Мн до минимальной и минимальной скорости и минимальной скорости
и минимальной скорости и минимальной скорости 8/допустимое перерегулирование или минимальное время переходного . процесса;
9/ момент инерции механизма, приведенный к валу электродвигателя Imax;
10/ сочетание жестких обратных связей. Например, отрицательная обратная связь по скорости и положительная обратная связь по току; отрицательная обратная связь по напряжению и положительная обратная связь по току и др.;
11/ стопорный ток на электромеханической характеристике электропривода, работающего на верхней границе диапазона регулирования I*стоп /относительные единицы/
^ 4. МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ПРОЕКТИРОВАНИЮ
Выполнение курсового проекта необходимо начинать о подробного анализа технического задания /исходных данных/ и уяснения сути необходимых расчетов и исследований, которые должны быть выполнены при проектировании. Необходимо просмотреть рекомендуемую литературу и ознакомиться с методами решения задач, вынесенных в курсовой проект. Следует попытаться найти собственный путь решения этих задач. Если это затруднительно, необходимо обратиться к рекомендуемым литературным источникам, включая и последующие разделы настоящих методических указаний, составленных применительно к наиболее распространенным АСУ ЭП.
4.1 Система тиристорный преобразователь - двигатель с последовательной коррекцией
Системы автоматизированного электропривода с последовательной коррекцией при подчиненном регулировании параметров, или, как часто их называют, системы подчиненного регулирования /СПР/, в последние годы широко применяются во многих отраслях промышленности. Их преимущества по сравнению с системами с параллельной коррекцией:
1/ неизменность структуры для объектов управления с различными параметрами регулирования;
2/ предельная простота расчета, так как расчет СИР сводится к определению по простейшим формулам сопротивлений и емкостей, подключаемых ко входу и в цепь обратной связи операционных усилителей, на базе которых реализуются корректирующие устройства;
3/ простота и удобства наладки;
4/ легкость и простота ограничения на требуемом уровне любой регулируемой координаты электропривода /тока якоря, угловой скорости и др./;
5/ возможность использования унифицированной блочной системы - регуляторов /УБСР/,
Наибольшее распространение получили СИР с исполнительными двигателями постоянного тока.
В соответствии с изложенным в разд.2 содержанием курсового проекта остановимся кратко на каждом из разделов проекта по рассматриваемой теме,
4.1.1 Введение. Показать роль АСУ ЭП в деле автоматизации промышленного производства, повышения его эффективности. Указать основные преимущества, технические возможности и области применения электропривода по системе тиристорный преобразователь - двигатель /ТП-Д/.
4.1.2. Выбор двигателя. Вопрос о правильном выборе электродвигателя является весьма важным и ответственным. Завышение мощности двигателя приводит к увеличению капитальных и эксплуатационных расходов, снижению КПД и коэффициента мощности электропривода. Недостаточная мощность двигателя ограничивает производительность механизма /установки/ и кроме того, двигатель преждевременно выходит из строя, что влечет за собой простой оборудования и дополнительные расходы на ремонт.
В проекте электродвигатель выбирается, исходя из приводимых в задании данных о его мощности и скорости. Двигатель следует выбирать с таким номинальным напряжением, чтобы исключить из тиристорного преобра-
зователя силовой трансформатор, в результате чего уменьшается масса и габаритные показатели электропривода. Рекомендуется выбирать двигатель, общепромышленного назначения серии П или 2П. В пояснительной записке необходимо привести тип и технические данные выбранного двигателя .
4.13. Выбор принципиальной схем силовых цепей и разработка схемы цепей управления. При выборе принципиальной схемы силовых цепей ти-ристорного преобразователя для электроприводов малой и средней мощности следует придерживаться следующих рекомендаций:
1/ при мощности двигателя р<10кВт необходимо применять трехфазную схему с нулевым выводом; если р > 10 кВт, предпочтение следует отдавать трехфазной симметричной мостовой схеме;
2/ если тиристорный преобразователь выполнен по схеме с нулевым выводом или по перекрестной схеме, применение силового трансформатора является обязательным. При использований трехфазной мостовой схемы преобразования необходимо вначале рассчитать требуемое действующее значение напряжения на вторичной обмотке трансформатора U2ф если выполняется условие
то силовой трансформатор не требуется; при этом вентильная группа преобразователя подключается к сети через токоограничивающие реакторы;
3/ в случае реверсивного электропривода необходимо решить вопрос о способе управления вентильными комплектами преобразователя. Если к реверсивному тиристорному электроприводу предъявляются высокие требования по быстродействию, то необходимо предусмотреть совместное согласованное управление выпрямительным и инверторным вентильными комплектами преобразователя. При нежестких требованиях к быстродействию используют раздельный способ управления вентильными комплектами реверсивного преобразователя. Более подробно принципиальные схемы силовых цепей тиристорных преобразователей рассмотрены в /5; 6/.
В качестве системы ипульсно-фазового управления /СИФУ/ тиристорами силовой цепи можно использовать блоки управления тиристорами /БУТ/ серийно выпускаемых тиристорных преобразователей или комплектных тири-сторных электроприводов /3; 4 и др./.
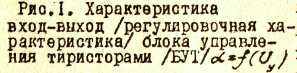
При выполнении необходимых расчетов можно пользоваться типовой регулировочной характеристикой БУТ /рис.1/. Эта регулировочная характеристика может рассматриваться как универсальная, справедливая для любых БУТ, независимо от особенностей их схемной реализации. Следует
также иметь в виду, что подобный прямолинейный вид этой характеристики справедлив для БУТ, построенных до принципу вертикального управления.
Разработку схемы БУТ следует выполнять в два этапа: вначале спроектировать функциональную схему, а затем разработать принципиальную схему каждого элемента функциональной схемы.
При схемной реализации БУТ необходимо учитывать следующие факторы: а/ вид силовой схемы тиристорного преобразователя - трехфазная мостовая или трехфазная с нулевым выводом; б/ тип электропривода - нереверсивный или реверсивный; в/в случае реверсивного электропривода способ управления отдельными группами тиристоров /"Вперед" и "Назад"/ - совместное управление или раздельное управление; г/ в случае реверсивного электропривода с совместным управлением характер согласования работы отдельных групп тиристоров - согласованное или несогласованное; д/ мощность электропривода - в том аспекте, который определяет количество параллельно включенных тиристоров в каждом плече силового блока ТП.
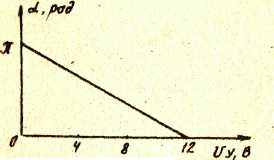
Структура всей системы управления электроприводом зависит от числа регулируемых параметров и зон регулирования. Упрощенная принципиальная схема двухконтурной СПР с однозонным регулированием скорости /с обратными связями по току и скорости/ имеет вид, изображенный на рис2. Схема включает: ЗИ - задатчик интенсивности, PC - регулятор скорости; РТ - регулятор тока якоря; БУТ1» БУТ2 - блоки управления тиристорами; ТР - разделительный или понижающий трансформатор; комплекты вентилей IPB и 2РВ реверсивного преобразователя, ДТ - датчик тока; тахогенератор BR .
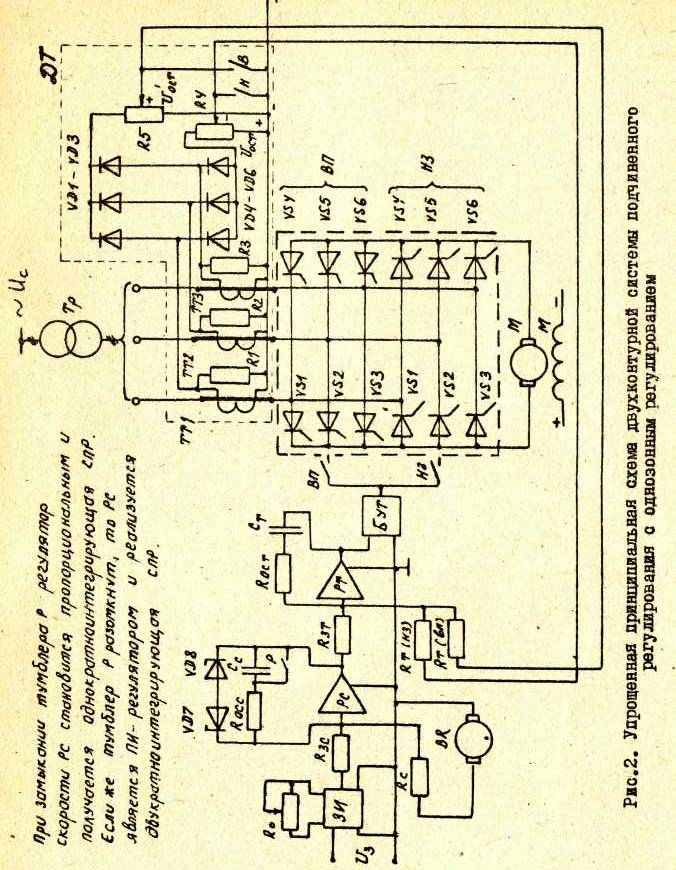
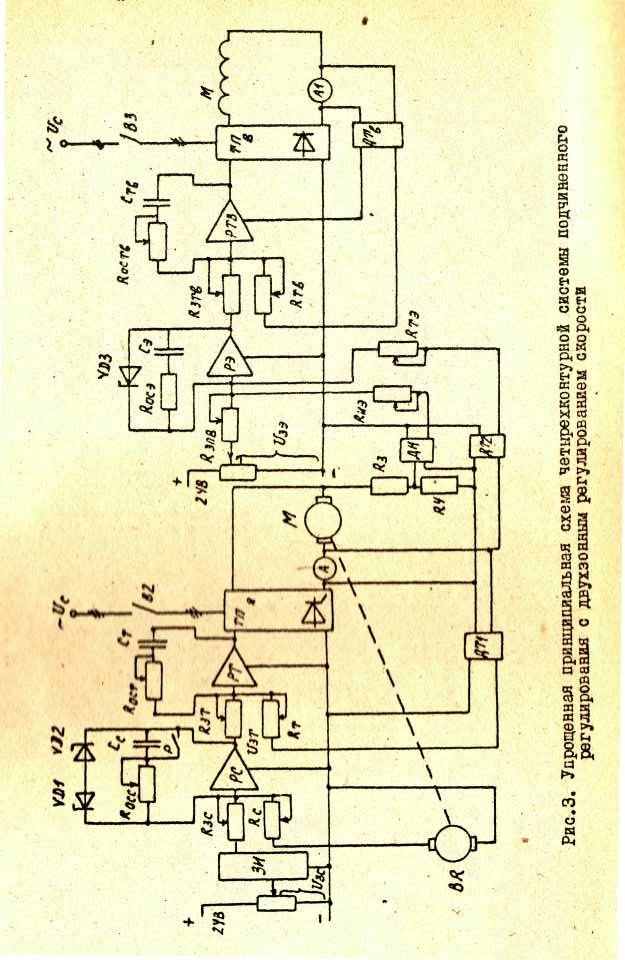
Упрощенная принципиальная схема четырехконтурной СПР с двухзонным регулированием скорости /с обратными связями по току якоря, скорости, току возбуждения и ЭДС/ имеет вид, изображенный на рис.3. Эта схема, помимо элементов, указанных на рис.2, включает: РЭ - регулятор ЭДС; РТВ - регулятор тока возбуждения; ТПв– тиристорный преобразователь, питающий обмотку возбуждения исполнительного двигателя.
4.1.4. Расчет параметров и выбор силовых элементов системы электропривода. Рассчитать параметры и выбрать по каталогам силовой трансформатор /или токоограничивающие реакторы/, тиристоры, сглаживающий дроссель и ограничивающие реакторы. В зависимости от приня-
той схемы силовых цепей отдельные элементы могут отсутствовать. Например, в случае нереверсивного электропривода отсутствуют ограничивающие реакторы, а при определенных численных значениях параметров исходных данных может оказаться излишней установка сглаживающего дросселя.
Расчет параметров основных силовых элементов электропривода подробно рассмотрен в /1; 2/.
4.1.5. Расчет элементов двухконтурной системы подчиненного регулирования с П-регулятором скорости. Такая СПР, называемая однократноинтегрирующей, реализуется в схеме /рис.2/ при замкнутом тумблере Р.
Порядок расчета элементов однократноинтегрирующей системы подчиненного регулирования может быть следующим:
1/ составить структурную схему объекта регулирования и определить передаточные функции отдельных звеньев;
2/ составить структурную схему СПР;
3/ рассчитать параметры контура тока /параметры регулятора тока и коэффициент обратной связи до току/;
4/ рассчитать параметры контура скорости /параметры регулятора скорости и коэффициент обратной связи по скорости/.
Рассмотрим более подробно отдельные этапы этого расчета.
4.1.5.I. Структурная схема объекта регулирования и передаточные функции отдельных звеньев. Объект регулирования включает в себя тиристорный преобразователь и двигатель /рис.4/.
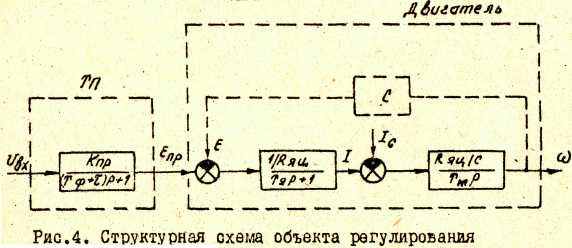 Передаточная функция тиристорного преобразователя WТП , на входе которого установлен фильтр, обладающий инерционностью, может быть представлена в виде
Передаточная функция тиристорного преобразователя WТП , на входе которого установлен фильтр, обладающий инерционностью, может быть представлена в виде 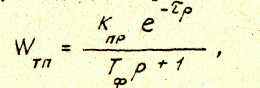
где Кпр– коэффициент усиления тиристорного преобразователя по напряжению; усредненное значение Кпр можно рассчитать по формуле

 здесь Кбут- коэффициент передачи блока управления тиристорами, определяется по характеристике вход-выход БУТ /см,рис 1/, Епр0– ЭДС тиристорного преобразователя при нулевом угле управления тиристорами;
здесь Кбут- коэффициент передачи блока управления тиристорами, определяется по характеристике вход-выход БУТ /см,рис 1/, Епр0– ЭДС тиристорного преобразователя при нулевом угле управления тиристорами; статистическое чистое запаздывание
системы управления тиристорами; т - число фаз эквивалентного преобразователя /для трехфазной мостовой схемы т = 6, для трехфазной схемы с нулевым выводом т = 3/;
fс= 50 Гц - частота сети; Тф– постоянная времени фильтра.
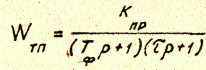
В
 ыражение для WТП можно упростить, если учесть, что
ыражение для WТП можно упростить, если учесть, что Тогда
 П
П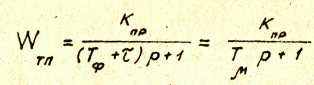 оскольку Тф и τ являются малыми постоянными, то два апериодических звена можно приближенно заменить одним с постоянной времени, равной сумме двух постоянных. Тогда
оскольку Тф и τ являются малыми постоянными, то два апериодических звена можно приближенно заменить одним с постоянной времени, равной сумме двух постоянных. Тогдагде Тм= Тф+τ, для реальных систем составляют Тм=0,008...0,01 с.
Внутренняя обратная связь по ЭДС двигателя /показана штриховой линией на рис.4/ при расчете регулятора тока СПР отбрасывается, что в переходных режимах не вносит существенной погрешности для большинства реальных приводов, у которых электромеханическая постоянная времени Тм достаточно большая. Это связано о тем, что переходные процессы в контуре тока протекают намного быстрее, чем изменение ЭДС двигателя, определяемое постоянной Тм . Поэтому ЭДС двигателя Е в первом приближении для замкнутого контура тока можно рассматривать как постоянное воздействие, которое по теории автоматического управления не влияет на устойчивость замкнутого контура и характер переходных процессов в нем.
При анализе статических режимов СПР учет внутренней обратной связи по ЭДС двигателя является обязательным.
4.1.5.2. Структурная схема двухконтурной системы подчиненного регулирования при отсутствии задатчика интенсивности, фильтров в це-
пях обратных связей и без учета внутренней обратной связи по ЭДС изображена на рис.5.
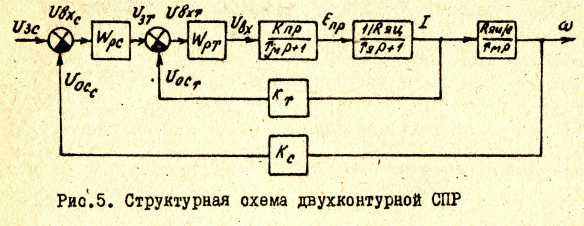
На приведенной схеме Wрт и Wрс - передаточные функции соответственно регулятора тока и регулятора скорости.
Расчет СПР следует начинать с внутреннего контура - контура тока.
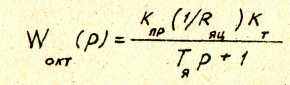
4.1.5.3. Расчет параметров контура тока /при отсутствии фильтра в цепи обратной связи и настройке регулятора на модульный оптимум/. Передаточная функция звеньев контура тока, действие которых должно быть скомпенсировано регулятором РТ
Передаточная функция регулятора тока РТ при настройке регулятор по модульному оптимуму


Передаточная функция оптимизированного контура тока в разомкнутом состоянии
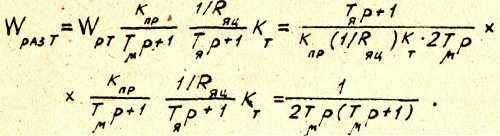
Как следует из полученного выражения, динамические характеристики замкнутого оптимизированного контура тока не зависят от электромагнитной постоянной Тя объекта регулирования и коэффициента обратной /отрицательной/ связи по току якоря КТ. Это достигнуто
благодаря компенсирующему действию регулятора РТ.
Передаточная функция оптимизированного контура тока в замкнутом
состоянии

Учитывая, что Тµ - малая некомпенсируемая постоянная контура тока, в знаменателе /3/ можно пренебречь членом при р2 , так как коэффициент при нем равен произведению малых постоянных. Тогда /3/ приближенно можно представить в виде

Выражение /4/ попользуется при расчете внешнего контура скорости.
4.1.5.3.1. Физическая реализация требуемой передаточной функции
/2/ регулятора тока РТ может быть осуществлена схемой на базе усилителя постоянного тока /УПТ/ с большим коэффициентом усиления в разомкнутом состоянии /рис.6/. Передаточная функция приведенной схемы /без учета изменения знака выходного сигнала по отношению к входному/ имеет вид
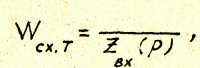
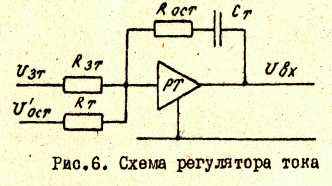
где Zoc(p) и Zвх(p)– полное сопротивление в операторной форме соответственно цепи обратной связи и входной цепи УПТ.
Как следует из схемы /см, рис.6/:

тогда

Регулятор с передаточной функцией вида /5/ называется пропорцио-нальноинтегральным или ПИ-регулятором, так как он осуществляет усиление и интегрирование входного сигнала, что видно из /5/, где Wсх.T представлено в виде суммы двух слагаемых.
Из сопоставления выражений /2/ и /5/ ясно, что схема на рис.6 обеспечит реализацию требуемой передаточной функции РТ при выполнений
следующих соотношений: