
Методические указания предназначены для студентов специальности "Электропривод и автоматизация промышленных установок"
| Вид материала | Методические указания |
- Методические рекомендации и указания по изучению дисциплины Автоматизированный электропривод, 70.72kb.
- Методические указания к выполнению расчётно графической работы №1 для студентов специальности, 243.93kb.
- План час. Сроки контроля Для студентов специальности 140604. 65 «Электропривод и автоматика, 154.73kb.
- Т. В. Фёдоров методические указания по технологической практике студентов IV курса, 107.4kb.
- Методические указания для выполнения лабораторных работ Новосибирск 2009, 437.08kb.
- Физические основы электроники, 499.24kb.
- Методические указания к проведению практических занятий по курсу «Архитектура гражданских, 272.14kb.
- Рабочая программа учебной дисциплины ф тпу 1-21/01 Федеральное агентство по образованию, 350.51kb.
- Электропривод и автоматика промышленных установок и технологических комплексов, 153.11kb.
- Методические указания к практическим занятиям и самостоятельной работе студентов Омск-2009, 848.08kb.

Выражение /31/ используется при расчете внешнего контура –
контура скорости.
Физическая реализация требуемой передаточной функции регулятора тока аналогична рассмотренной ранее для случая отсутствия фильтра в цепи обратной связи /см. п.п.4.1.5.3.1 и 4.1.5.3.2/.
4.1.6.2. Расчет контура скорости при наличии фильтра в цепи обратной связи. Структурная схема контура скорости на основании рис.11 с учетом /31/ будет иметь вид, изображенный на рис.12.
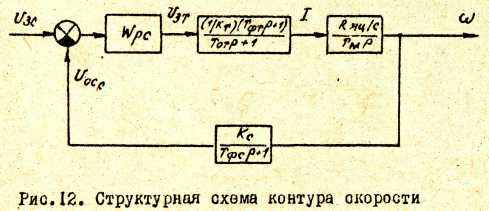
В данном контуре некомпенсируемыми являются форсирующее и апериодические звенья с постоянными ТФТ , ТОТ , и ТФС. Таким образом, передаточная функция элементов контура, действие которых должен компенсировать регулятор скорости WРС, имеет такой же вид, как и при отсутствии фильтров /см. п.4.1.5.4/.
Передаточная функция регулятора скорости при настройке на модульный оптимум с учетом фильтра с постоянной ТФС в цепи обратной связи
где ТОС - оптимизированная постоянная интегрирования разомкнутого контура скорости при настройке на модульный оптимум,

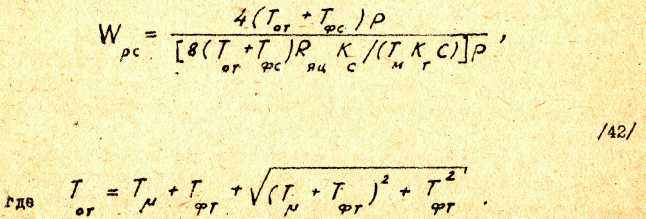
При подстановке WОК.С в выражение для WРС окончательно получаем
Физическая реализация П-регулятора скорости аналогична рассмотренной ранее для случая отсутствия фильтра в цепи обратной связи
/см. пп4.1.5.4.1 -4.1.5.4.3/.
4.1.7. Расчет электромеханических характеристик в двухконтурной СПР с пропорциональным регулятором скорости при отсутствии фильтров. Уравнение электромеханической характеристики двигателя на рабочем участке вытекает из выражения /20/, если последнее разрешить
относительно ω:

Уравнение /34/ справедливо для токов якоря, удовлетворяющих условию
0≤ I ≤ IМАКС где IМАКС - значение тока, при котором напряжение на выходе регулятора скорости достигает напряжения ограничения UЗТмакс. Из /34/ следует, что статическое падение скорости Δωс , обусловленное приложением нагрузки к валу двигателя, определяется вторым членом уравнения, т.е.

В разомкнутой системе статическое падение скорости
Δωс раз составляет
Тогда Δωс можно представить в виде

Выражение /36/ показывает, что жесткость электромеханических характеристик в двухконтурной СПР с пропорциональным регулятором скорости выше, чем в случае разомкнутой системы, если ТМ > 4Тµ
Для большинства реальных приводов электромеханическая постоянная привода ТМ больше учетверенной эквивалентной некомпенсируемой постоянной контура тока Тµ. Таким образом, как правило, жесткость электромеханических и механических характеристик двигателя в подобной СПР выше, чем в разомкнутой системе. Однако для многих приводов такая точность поддержания скорости оказывается недостаточной. В этих случаях применяются двухконтурные CПP с пропорционально-интегральным /ПИ/ регулятором скорости. Эти системы называют двукратноинтегрирующими.
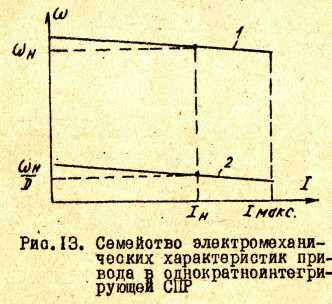
При I=IМАКС электромеханическая характеристика претерпевает
излом и совпадает с вертикалью I=IМАКС. Таким образом, электромеханические характеристики привода в СПР с пропорциональным регулятором скорости имеют вид, изображенный на рис.13.
4.1.8. Расчет электромеханических характеристик привода в двухконтурной СПР с П-регулятором скорости при наличии фильтров в цепях обратных связей по току и скорости.
Уравнение электромеханической характеристики на рабочем участке /при 0≤ I ≤ IМАКС / как следует из сопоставления рис.8 и рис.12 и уравнения /34/, аналогично уравнению, полученному для СПР без фильтров, и имеет вид

где ТОС определяется выражением /32/.
Особенностью электромеханических характеристик привода в системе с фильтрами является еще меньшая жесткость, чем в системе без фильтров, так как ТОС > 4Тµ. При I=IМАКС электромеханическая характеристика претерпевает излом и совпадает с вертикалью I=IМАКС.
Примерный вид электромеханических характеристик привода имеет вид, изображенный на рис.13.
4.1.9. Анализ динамических режимов двухконтурной СПР с
П-регулятором скорости /однократноинтегрирущая СПР/
4.1.9.1. По управляющему воздействию. Как видно из анализа выражений для передаточных функций контуров тока и скорости /3/ и /19/ при настройке регуляторов на оптимум по модулю, которые отличаются только значением некомпенсируемых постоянных /для контура скорости эта постоянная в 2 раза больше - 2 Тµ против Тµ / и коэффициентом передачи, переходный процесс в каждом контуре при скачке управляющего сигнала на входе будет близким к оптимальному по быстродействию. Перерегулирование будет 4,3 %, а время реакции 4,1σ /3/, где σ -не компенсируемая постоянная контура /для контура тока σ= Тµ, а для контура скорости σ =2Тµ , как изображено на рис.14/.
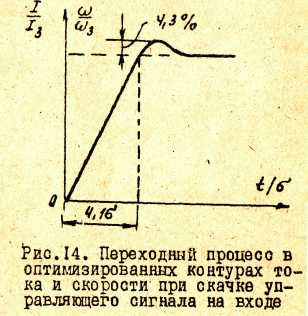
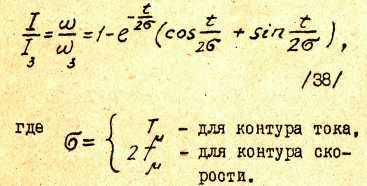
Аналитическое выражение для кривой /рис.14/, которая представляет собой переходную характеристику оптимизированного контура, легко может быть получено на основании /3/ и /19/
Необходимо иметь в виду, что подобный вид переходного процесса будет только при очень малых скачках управляющего напряжения / UЗТ или UЗС /, когда оба регулятора РТ и PC на протяжении всего переходного процесса не заходят в область ограничения.
В случае пуска или реверса двигателя в любой реальной СПР при
скачкообразном приложении сигнала задания скорости регулятор скорости очень быстро попадает в область ограничения, т.е. напряжение на выходе PC не изменяется при изменении результирующего сигнала на его входе. Поэтому реальный переходный процесс с учетом всех ограничений и нелинейностей может быть получен только с помощью цифровой ЭВМ при использовании более полной и адекватной математической модели, нежели уравнение /38/. Расчет переходных процессов с помощью цифровой ЭВМ будет рассмотрен далее.
4.1.9.2. По возмущающему воздействию. Под возмущающим воздействием для систем электропривода понимают изменение нагрузки на валу двигателя. Переходный процесс в рассматриваемой системе при ударном скачкообразном приложении нагрузки к валу двигателя имеет такой же характер и примерно такой же вид, как при управляющем воздействии /3/. Длительность переходного процесса примерно равна утроенной некомпенсируемой постоянной времени контура тока tрег=3Тµ . Перерегулирование тока и превышение максимального динамического снижения скорости по отношению к статическому не превышает 5%. В качестве базовых величин берутся установившиеся значения тока Ic и отклонения скорости Δωс.
Не следует забывать, что подобный переходный процесс справедлив лишь при очень малых набросах нагрузки, когда регуляторы в течение переходного процесса не заходят в область ограничения. Во всех других случаях простые аналитические выражения для скорости и тока, приведенные в 3, формулы /7-1/ и /7-9/, для расчета переходных процессов по возмущающему воздействию не применимы. В подобных случаях целесообразно использование цифровых ЭВМ для расчета переходных процессов.
4.1.10. Расчет элементов двухконтурной системы подчиненного регулирования с ПИ-регулятором скорости /при настройке PC на симметричный оптимум/. Такая СПР называется двукратноинтегрирущей и реализуется в схеме на рис.2 при разомкнутом тумблере Р.
В тех случаях, когда статическая и динамическая точность поддержания скорости двигателя при набросе и сбросе нагрузки оказывается недостаточной в двухконтурной СПР с пропорциональным PC, применяется двукратноинтегрирующая СПР, отличие которой от рассмотренной ранее однократноинтегрирующей заключается в замене П-регулятора скорости ПИ-регулятором, что соответствует настройке PC на симметричный оптимум. В этом случае, как будет показано далее, статическая ошибка по скорости при набросе и сбросе нагрузки отсутствует.
Расчет параметров контура тока двукратноинтегрирущей СПР совпадает с рассмотренным ранее /для однократноинтегрирующей СПР/.
4.1.10.1. Расчет параметров контура скорости /при отсутствий фильтров/. ПИ-регулятору скорости соответствует настройка PC на так называемый симметричный оптимум. При этом пропорциональная часть передаточной функции ПИ-регулятора скорости совпадает с передаточной функцией Wpc П-регулятора однократноинтегрирующей СПР, полученной ранее /18/. Передаточная функция ПИ-регулятора скорости имеет вид
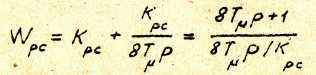
Подставляя в последнее выражение КРС из /18/, окончательно получаем

Коэффициент обратной связи по скорости К можно определит*
по /21/.
Физическая реализация передаточной функции регулятора скорости осуществляется аналогично рассмотренному ранее для РТ.
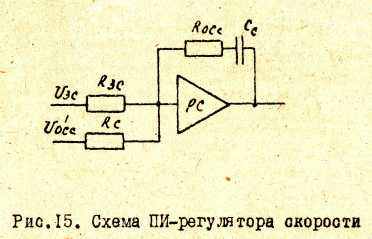
Электрическая схема ПИ-регулятора скорости имеет вид, изображенный на рис.15.
Для определения параметров регулятора скорости необходимо:
а/ задаться емкостью конденсатора СС . Можно принять
СС = 0,5...2 мкФ;
б/ найти сопротивление RОСС в цепи обратной связи УПТ

в/ рассчитать входное сопротивление регулятора скорости RЗ.С

г/ рассчитать сопротивление RС, на которое заводится сигнал обратной связи по скорости, воспользовавшись формулой /27/, которая справедлива и для случая П-регулятора.
4.1.10.2. Расчет параметров контура скорости /при наличии фильтров/, С учетом общепринятых допущений /5/ передаточная функция регулятора скорости при настройке на симметричный оптимум имеет вид
Физическая реализаций этой передаточной функции осуществляется аналогично рассмотренной ранее /см. п.4.1.10.1/.
4.1.11. Расчет электромеханических характеристик в двухконтурной СПР с ПИ-регулятором скорости. Как следует из структурной схемы /см. рис.,5/ с учетом выражения /39/ для передаточной функции PC, в установившемся режиме результирующее входное напряжение PC должно быть равно нулю, т.е.

Выражение /43/ представляет собой уравнение электромеханической или механической характеристики. Как видно из /43/, угловая скорость двигателя ω не зависит от тока якоря, т.е. статическая скоростная ошибка, обусловленная набросом или сбросом нагрузки, отсутствует. Таким образом, электромеханические характеристики в двукратноинтегри-рующей СПР для 0 ≤ I ≤ IМАКС представляют собой прямые, параллельные оси абсцисс, как изображено на рис.16.
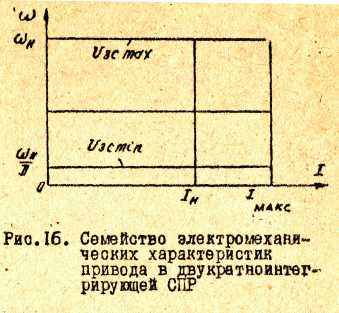
При I= IМАКС электромеханические характеристики претерпевают излом, так как PC выходит в область ограничения, и представляются отрезком вертикали I= IМАКС.
В области прерывистого тока в установившемся режиме уравнение /43/ остается в силе. Однако двукратноинтегрирующая СПР в случае прерывистого тока в якоре может стать неустойчивой, если параметры регуляторов будут неизменными.
Как показывает практика, для нормальной работы СПР в области прерывистого тока необходимо применение адаптивного регулятора тока РТ. В традиционных системах это требует усложнения схемы регулятора и все же обеспечивает лишь удовлетворительное качество переходных процессов. Для кардинального решения проблемы прерывистого тока в электроприводе весьма перспективным является применение микропроцессорных систем, которые позволяют реализовать программным путем значительно более сложные алгоритмы управления, нежели традиционные аналоговые или цифровые системы на жесткой логике.
Другим направлением преодоления нежелательных эффектов, вызываемых прерывистыми токами, является сужение зоны этих токов, что требует установки сглаживающих дросселей значительной индуктивности. Подобное решение сильно ухудшает массо-габаритные показатели привода. В последнее время наметилась тенденция к уменьшению использования дополнительных индуктивностей в силовых цепях привода, однако это требует существенного усложнения регуляторов СПР.
4.1.12. Анализ динамических режимов двукратно-интегрирующей СПР
4.1.12.1. По управляющему воздействию. При настройке PC на симметричный оптимум реакция двукратноинтегрирующей СПР на скачок напряжения задания скорости UЗ.С оказывается менее благоприятной, чем однократноинтегрирующей. Время регулирования увеличивается примерно вдвое, увеличивается также перерегулирование в контуре скорости, которое превышает 40 %. Для уменьшения перерегулирования до уровня однократно-
интегрирующей системы на входе двукратноинтегрирующей СПР устанавливают апериодическое звено либо задатчик интенсивности,
4.1.12.2. По возмущающему воздействию. Реакция двукратноинтег-рирующей СПР на скачок возмущающего воздействия / ΔIC / более благоприятна, чем однократноинтегрирующей. Хотя время регулирования примерно в 2 раза больше, чем для однократноинтегрирующей tрег = 8σ, максимальная динамическая скоростная ошибка оказывается меньше. Максимальная динамическая скоростная ошибка составляет примерно 80 % установившейся статической скоростной ошибки в однократноинтегрирующей СПР.
Перерегулирование в контуре тока достигает 50 %.
В целом можно заключить, что двукратноинтегрирующая СПР для систем стабилизации скорости является предпочтительной по сравнению о однократноинтегрирующей.
4ЛЛЗ. Расчет переходных процессов при пуске, набросе
или сбросе нагрузки в двухконтурной СПР на
цифровой ЭВМ.
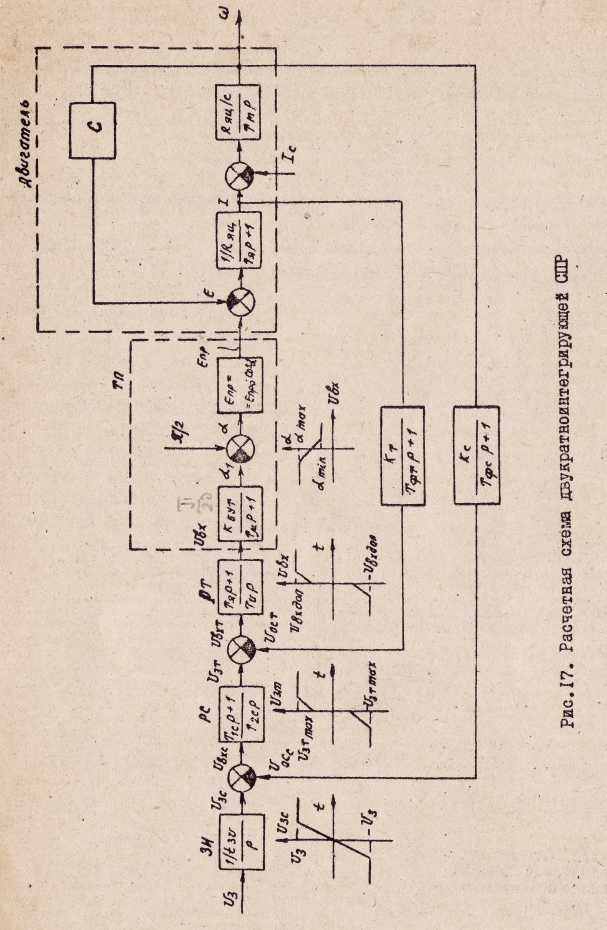
4.1.13.1. Математическая модель. При составлении математической модели можно взять за основу структурную схему на рис.11, дополнив ее задатчиком интенсивности ЗИ, учетом внутренней обратной связи по ЭДС двигателя, нелинейности коэффициента передачи тиристорного преобразователя и ограничений отдельных промежуточных координат системы. Тогда получится расчетная схема, изображенная на рис 17.
Схема на рис.17 справедлива при использовании блока управления тиристорами БУТ /см.рис.1/. Графики под блоками ЗИ, PC и РТ представляют собой реакции этих динамических звеньев на скачок входного сигнала. График, расположенный на рисунке справа, является статической характеристикой вход-выход БУТ с учетом ограничения минимального и максимального углов управления тиристорами.
Переходя от передаточных функций динамических звеньев /рис.17/ к дифференциальным или алгебраическим уравнениям и учитывая ограничения, получаем.
I. Для задатчика интенсивности ЗИ
Заменяя р на d/dt, что соответствует переходу от функции комплексного переменного к функции времени, имеем
Выражение для определения коэффициентов Рунге – Кутта, необходимое при численном решении дифференциального уравнения, имеет вид

Это выражение получено из исходного дифференциального при замене дифференциалов конечными приращениями.
Ограничение выходного напряжения ЗИ на уровне UЗ учитывается
в общем случае следующим образом /рис.18/.
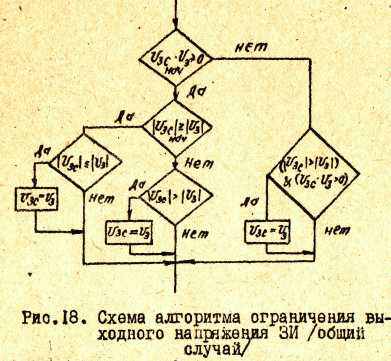
На приведенной структурной схеме использованы обозначения: UЗС нач - напряжение на выходе ЗИ в начальный момент рассматриваемого переходного процесса; знак & - логическая функция "И"
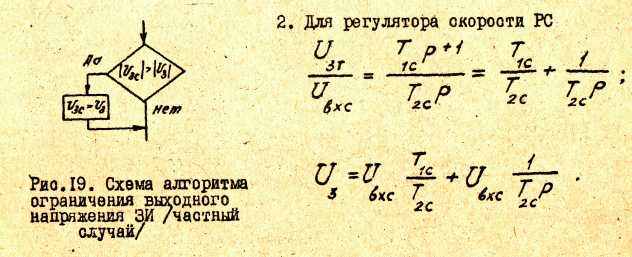
В частном случав пуска двигателя от нулевой скорости приведенная схема существенно упрощается /рис.19/.
Введем обозначение
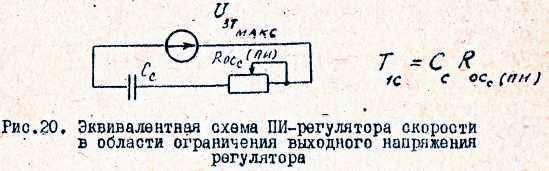
где UС.С. представляет собой напряжение на емкости СС регулятора скорости /рис.20/; в то ж время, как следует из последнего выражения для
UЗТ ,UСС является интегральной составляющей выходного напряжения ПИ-регулятора скорости.
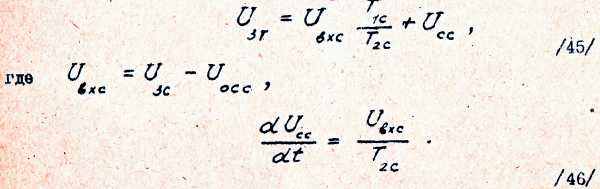 С учетом введенного обозначении
С учетом введенного обозначенииВыражение для коэффициентов Рунге – Кутта

Напряжение обратной связи по скорости связано со скоростью зависимостью
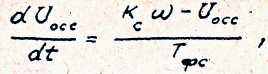 откуда выражение для коэффициентов Рунге - Кутта
откуда выражение для коэффициентов Рунге - Кутта
 Формулы /47/ и /48/ справедливы при
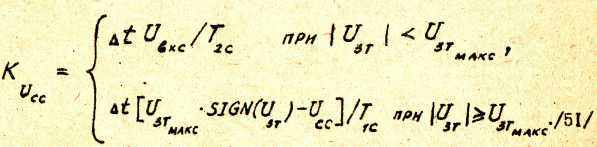
Формулы /47/ и /48/ справедливы при При достижении UЗТ уровня ограничения изменяется эквивалентная схема регулятора, и схема включения конденсатора СС принимает вид, изображений на рис.20.
В области ограничения, как следует из рис.20, дифференциальное уравнение для напряжения на конденсаторе СС принимает вид

Выражение для коэффициентов Рунге - Кутта

Функция SIGN(x) , где х - переменная, используемая в /49/ и /50/, является функцией выделения знака х , т.е.
Таким образом, с учетом /48/ и /50/, получим
Ограничение выходного напряжения PC учитывается еравенством

 3. Для регулятора тока РТ
3. Для регулятора тока РТ Вводим обозначение
Вводим обозначение UСТ равно напряжению на емкости СТ РТ /см.рис.6/ и представляет собой интегральную составляющую выходного напряжения РТ.
С учетом введенного обозначения


Выражение для коэффициентов Рунге - Кутта /для напряжения UСТ/

Напряжение обратной связи по току якоря связано с током якоря зависимостью
Соотношения /54/ и /55/ справедливы при | Uвх |< Uвх.доп.
При достижении Uвх, уровня ограничения изменяется эквивалентная схема регулятора и схема включения конденсатора СТ принимает вид,
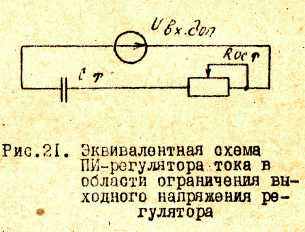
изображенный на рис.21.
В области ограничения, т.е. при
Uвх = Uвх.доп , как следует из рис.21, дифференциальпое уравнение для напряжения на конденсаторе СТ принимает вид
Таким образом, с учетом /55/ и /56/ получим для коэффициентов Рунге - Кутта
