
Выпускной работы
| Вид материала | Реферат |
СодержаниеРазработка электрической принципиальной схемы Разработка топологии печатной платы Разработка и отладка ПО для микроконтроллера Описание программы |
- Положение о сдаче экзамена в форме защиты выпускной учебно-исследовательской экзаменационной, 39.24kb.
- Методические рекомендации по подготовке выпускной квалификационной работы бакалавра, 573.85kb.
- Методические рекомендации по выполнению выпускной квалификационной работы (дипломной, 525.53kb.
- Выпускной квалификационной работы, 5390.24kb.
- Методические рекомендации по выполнению выпускной квалификационной работы для студентов, 604.91kb.
- Методические рекомендации по выполнению выпускной квалификационной работы для студентов, 555.68kb.
- Приказ №, 1441.82kb.
- Методические указания по выполнению выпускной квалификационной работы для студентов, 551.88kb.
- Методические рекомендации по выполнению выпускной квалификационной работы по специальности:, 132.97kb.
- Методические рекомендации по подготовке и защите выпускных квалификационных работ, 320.02kb.
Разработка электрической принципиальной схемы
Разработка электрической принципиальной схемы УСО для макета иммобилизатора производилась согласно постановке задачи, описанной в подразделе 1.2 по структурной схеме, разработка которой отражена в подразделе 2.1.
В качестве коммутирующих элементов УСО Были выбраны твердотельные реле КР293КП5А, что было отражено в подразделе 2.2. Выбор разъемов для кабелей робота обусловлен параметрами этих кабелей и уже имеющимися разъемами ни них. В случае робота Феникс-3 тип этих разъемов – WF-5/HU-5. Выбор разъема для провода, соединяющего УСО и приемно-исполнительное устройство, обусловлен имеющимся разъемом на приемно-исполнительном устройстве MOLEX 53048-071. Для простоты подключения такой же разъем был использован на плате УСО. Для индикации была выбрана диодная сборка A764B/3G с тремя светодиодами.
В УСО используются два реле КР293КП5А для коммутации двух цепей управления. Для ограничения тока, протекающего через их управляющие входы, были добавлены два резистора. Ниже приведен расчет значений требуемых сопротивлений резисторов.
Значение сопротивления R определяется по формуле:
R = (VMC – VP) / I,
где:
VMC – напряжение на выходе порта ввода/вывода микроконтроллера,
VP – входное напряжение реле, I – входной ток реле.
Отсюда получим:
R1 = R5 = (2,3 – 1,2) / 0,015 ≈ 73 Ом.
Возьмем резистор 75 Ом, произведя округление в большую сторону до ближайшего выпускаемого номинала.
Разъемы WF-5 выбраны для совместимости с используемыми на роботе кабелями управления двигателями. Аналогично сделан выбор разъема для подключения кабеля, связывающего УСО и приемно-исполнительное устройство, это MOLEX 53048-071.
Для индикации была добавлена светодиодная сборка из трех светодиодов. Один светодиод показывает наличие питания, а два других прохождение сигнала иммобилизации. Ниже приведен расчет резисторов, ограничивающих ток, проходящий через светодиоды.
Резистор R определяется по формуле, аналогичной формуле расчета сопротивления:
R = (VS – VL) / I,
где:
VS – напряжение питания,
VL – прямое напряжение, расчётное для каждого типа диодов,
I – ток светодиода.
Отсюда получим:
R2 = (3 – 1,5) / 0,02 = 75 Ом,
R3 = R4 = (2,3 – 1,5) / 0,02 = 40 Ом.
Резисторы R3, R4 возьмем номиналом 43 Ом, а резистор R2 – 75 Ом.
Принципиальная схема УСО представлена в приложении А.
-
Разработка топологии печатной платы
Топология печатной платы УСО была разработана в программном комплексе Altium Designer 9.1.0.18363. Она представлена в приложении Б. Сборочный чертеж представлен в приложении В. Спецификация представлена в приложении Г.
-
Разработка и отладка ПО для микроконтроллера
Описание протокола обмена
Ниже описан базовый вариант протокола, который использует возможности цифрового канала, реализуемого на ЦСДУ-2, но имеет ряд существенных отличий, учитывающих специфику разрабатываемого устройства.
На сетевом уровне реализуемый протокол не отличается от протокола ЦСДУ-2. Топология сети – «точка-точка». Обмен информацией между пультом управления и приемно-исполнительным устройством производится в полудуплексном режиме. Каждый пульт управления работает со своим приемно-исполнительным устройством. Максимальное количество узлов в сети 255. Адреса 0 и 255 используются для передачи широковещательных (сервисных) команд.
Передаваемый кадр данных (посылка) состоит из 48 байт. Один байт используется для кодирования команды остановки/запуска робота или подтверждения остановки/запуска. Остальные байты в настоящее время не используются, они зарезервированы для дальнейшего использования. В частности с их помощью можно реализовать защищенный протокол передачи данных, осуществлять фоновую проверку уровня сигнала и добавить в устройство новые функции, например, контроль функционирования мобильного устройства.
Во время работы в фоновом режиме пульт управления периодически посылает кадр запроса уровня сигнала, приемно-исполнительное устройство посылает в ответ кадр данных (рисунок 12). Если уровень сигнала слабый, пульт управления показывает это оператору своей индикацией. Такой обмен происходит через определенные промежутки времени для экономии питания. Однако эта функция в настоящий момент не реализована.
Команда остановки или запуска передается пультом управления, в ответ приходит подтверждение от приемно-исполнительного устройства (рисунок 13). В случае отсутствия подтверждения команда будет передаваться повторно, до 30 раз, пока подтверждение не будет получено (рисунок 14). При получении приемно-исполнительным устройством кадра с нарушениями целостности посылки (неверный CRC) подтверждение не высылается, и оно остается в RX состоянии.
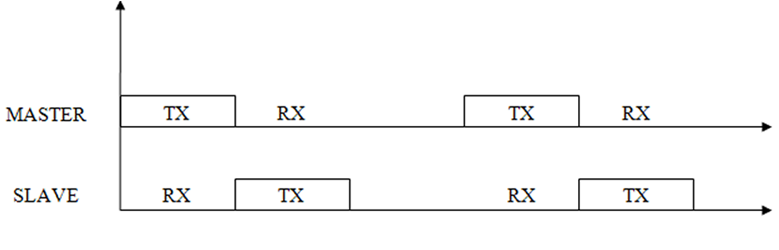
Рисунок 12 – Временная структура фоновой проверки уровня сигнала.
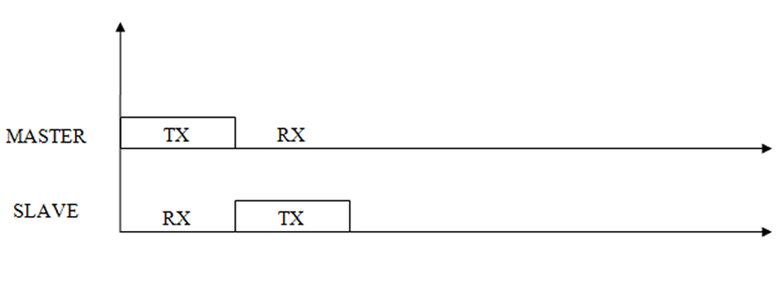
Рисунок 13 – Временная структура «оптимального» обмена при посылке команды
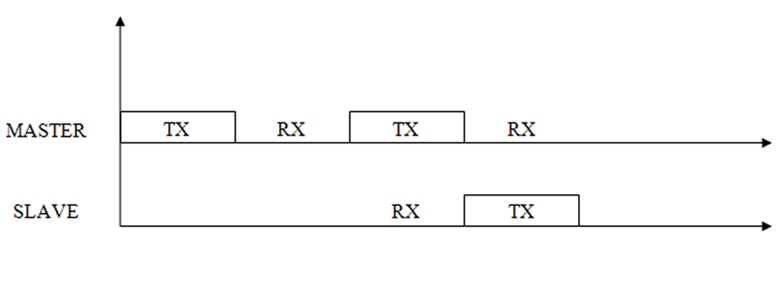
Рисунок 14 – Временная структура обмена при посылке команды в случае отсутствия подтверждения от приемно-исполнительного устройства
Пояснения к рисункам 12, 13, 14:
MASTER – мастер-устройство системы ЦСДУ-2, пульт управления иммобилизатора,
SLAVE – слэйв-устройство системы ЦСДУ-2, приемно-исполнительное устройство иммобилизатора,
TX – фаза передачи,
RX – фаза приема.
-
Описание программы
Программное обеспечение для канальной апаратуры делится на программу для пульта управления и приемно-исполнтельного устройства. На рисунках 15, 16, 17 представлены блок схемы программы пульта управления, а на рисунках 18, 19, 20 блок схемы программы приемно-исполнительного устройства.

Рисунок 15 – Блок-схема программы пульта управления

Рисунок 16 – Блок-схема подпрограммы фазы передачи программы пульта управления

Рисунок 17 – Блок-схема подпрограммы фазы приема программы пульта управления

Рисунок 18 – Блок-схема программы приемно-исполнительного устройства

Рисунок 19 – Блок-схема подпрограммы фазы приема и фазы передачи программы приемно-исполнительного устройства

Рисунок 20 – Блок-схема подпрограммы фазы передачи программы приемно-исполнтельного устройства
Программа была написана на ассемблере MPASM для микроконтроллеров PICmicro. При написании программы активно использовался аппарат макросов, что позволило упростить процесс написания программы и повысило ее наглядность. Списки макросов общего назначения, а также специализированных макросов брелка с пояснениями (без объявления) представлены соответственно в приложениях Д и Е.
Фрагменты основных модулей программ пульта управления и приемно-исполнительного устройства приведены соответственно в приложениях Ж и З.