
Електромеханічні системи та автоматизація
| Вид материала | Документы |
СодержаниеМета роботи. Матеріал і результати дослідження. |
- Електромеханічні системи та автоматизація, 84.63kb.
- Електромеханічні системи та автоматизація, 65.15kb.
- Електромеханічні системи та автоматизація, 71.49kb.
- Електромеханічні системи та автоматизація, 76.38kb.
- Електромеханічні системи та автоматизація, 115.67kb.
- Електромеханічні системи та автоматизація, 164.34kb.
- Завідувач кафедри М. П. Рагозін затверджено: на засіданні навчально-видавничої ради, 230.44kb.
- Міністерство освіти І науки України Харківська національна академія міського господарства, 331.39kb.
- Автоматизовані системи діловодства, 57.34kb.
- Спеціальність: 090702 "Радіоелектронні пристрої, системи та комплекси " Освітньо-кваліфікаційний, 67.37kb.
ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ ТА АВТОМАТИЗАЦІЯ
УДК 621.337.522
ШЛЯХИ ПІДВИЩЕННЯ ЕФЕКТИВНОСТІ РЕКУПЕРАТИВНОГО ГАЛЬМУВАННЯ В СУЧАСНИХ УМОВАХ
Дубинець Л.В., Устименко Д.В.
Дніпропетровський національний університет залізничного транспорту
ім. академіка В. Лазаряна
Вступ. В залежності від умов роботи залізниць та характеристик рухомого складу на кожному етапі роботи електрифікованих залізниць були свої оцінки ефективності рекуперативного гальмування та рекомендації до його застосування. В минулому на залізницях України перевага віддавалася важковаговим вантажним поїздам (близько 6000 т), і рекуперативне гальмування використовувалось, насамперед, на затяжних спусках з великими ухилами для підтримання швидкості руху близької до допустимої. З урахуванням цього і проектувались системи керування рекуперативним гальмуванням.
За останні роки умови роботи залізниць значно змінились: підвищились питомі експлуатаційні витрати (в тому числі різко зросла і продовжує збільшуватись вартість електроенергії на тягу поїздів), суттєво зменшилась кількість важковагових поїздів (середня вага вантажного поїзда по залізницям України складає 3268 т станом на 2002 рік) [1].
Мета роботи. Основна мета роботи – проаналізувати ефективність використання рекуперативного гальмування на існуючому електрорухомому складі в нових умовах та дати рекомендації щодо її підвищення.
Матеріал і результати дослідження. В цих умовах доцільно, з метою розширення полігону, використовувати постійно рекуперативне гальмування, не тільки для підтримання швидкості на спусках, а й уповільнення поїзда перед зупинками або місцями зниження швидкості.
Існуючі системи керування процесом рекуперативного гальмування на електровозах постійного струму, якими обладнано більшість електровозів, що експлуатуються в Україні, не дозволяють при гальмуванні із зменшенням швидкості в автоматичному режимі формувати необхідну гальмівну характеристику
 . Функція формування покладена на машиніста, тому на заданій ділянці
. Функція формування покладена на машиніста, тому на заданій ділянці  (рис. 1) можливо декілька варіантів зниження швидкості руху тільки за рахунок рекуперативного гальмування на існуючих електровозах:
(рис. 1) можливо декілька варіантів зниження швидкості руху тільки за рахунок рекуперативного гальмування на існуючих електровозах:- Гальмівне зусилля змінюється таким чином, що поїзд рівномірно уповільнюється від початкової швидкості
 до кінцевої
до кінцевої  з
з  . При цьому точно виконується графіковий час руху
. При цьому точно виконується графіковий час руху  на ділянці довжиною .
на ділянці довжиною .
- Значення гальмівного зусилля на початку гальмування вибрано таким чином, що поїзд уповільнюється з
 , тому в точці „C” машиніст повинен скоригувати значення гальмівної сили, щоб у місці обмеження швидкості мати швидкість
, тому в точці „C” машиніст повинен скоригувати значення гальмівної сили, щоб у місці обмеження швидкості мати швидкість  . Так як машиніст повинен слідкувати за виконанням графіка руху, то в точці „С” потрібно збільшити гальмівну силу настільки, щоб
. Так як машиніст повинен слідкувати за виконанням графіка руху, то в точці „С” потрібно збільшити гальмівну силу настільки, щоб  . За таких обставин швидкість поїзда в кінці ділянки гальмування буде мати значення
. За таких обставин швидкість поїзда в кінці ділянки гальмування буде мати значення  (точка „D”, рис. 1), а величина уповільнення на ділянці „CD”
(точка „D”, рис. 1), а величина уповільнення на ділянці „CD”  . Оскільки згідно графіка руху швидкість поїзда в точці „D” повинна бути приблизно рівною
. Оскільки згідно графіка руху швидкість поїзда в точці „D” повинна бути приблизно рівною  , то за другим варіантом на подальших ділянках потрібно компенсувати величину
, то за другим варіантом на подальших ділянках потрібно компенсувати величину  , що призведе до додаткових витрат електроенергії.
, що призведе до додаткових витрат електроенергії.
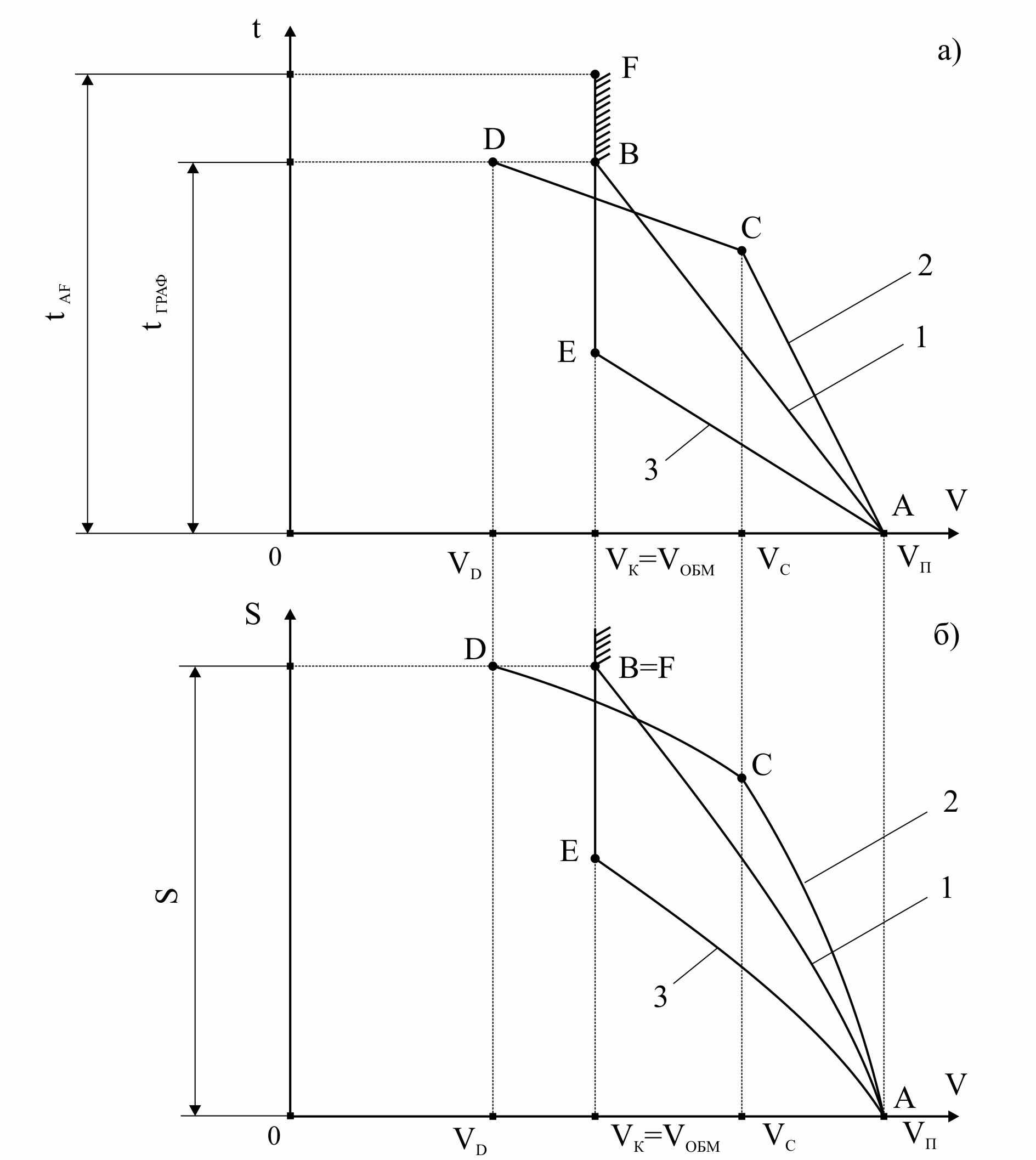
Рисунок 1 - Варіанти залежностей
 ,
,  при ручному виборі гальмівного зусилля
при ручному виборі гальмівного зусилля- Величина гальмівного зусилля на початку гальмування вибрана таким чином, що величина уповільнення поїзда має значення
 , тому в точці „E” шляху (рис. 1, б), характеристика 3) швидкість руху буде мати значення
, тому в точці „E” шляху (рис. 1, б), характеристика 3) швидкість руху буде мати значення  . В цьому випадку існуючі системи керування автоматично, без участі машиніста, коригують гальмівне зусилля
. В цьому випадку існуючі системи керування автоматично, без участі машиніста, коригують гальмівне зусилля  і електровоз переходить в режим рекуперативного гальмування з підтриманням сталої швидкості (ділянка „EF”), а величина сповільнення має значення
і електровоз переходить в режим рекуперативного гальмування з підтриманням сталої швидкості (ділянка „EF”), а величина сповільнення має значення  . Оскільки середня швидкість руху за третім варіантом на ділянці дещо менша від середньої по графіку, в точку „F”, яка є кінцем гальмівного шляху, поїзд прийде з запізненням на величину
. Оскільки середня швидкість руху за третім варіантом на ділянці дещо менша від середньої по графіку, в точку „F”, яка є кінцем гальмівного шляху, поїзд прийде з запізненням на величину  . Очевидно, що величину цього запізнення
. Очевидно, що величину цього запізнення  можливо компенсувати лише підвищенням середньої швидкості руху на подальших ділянках, що, як і за другим варіантом, призводить до додаткових витрат електроенергії.
можливо компенсувати лише підвищенням середньої швидкості руху на подальших ділянках, що, як і за другим варіантом, призводить до додаткових витрат електроенергії.
Якісний вигляд гальмівних характеристик, для вказаних на рис. 1 а), б) варіантів зниження швидкості, наведено на рис. 2: характеристика 1 –
 ; характеристика 2 –
; характеристика 2 –  ; характеристика 3 –
; характеристика 3 –  ,
,  ; характеристика 4 – обмеження по умовам зчеплення коліс з рейками; характеристика 5 – обмеження по потенціальним умовам на колекторі; характеристика 6 – обмеження по максимальному значенню швидкості.
; характеристика 4 – обмеження по умовам зчеплення коліс з рейками; характеристика 5 – обмеження по потенціальним умовам на колекторі; характеристика 6 – обмеження по максимальному значенню швидкості.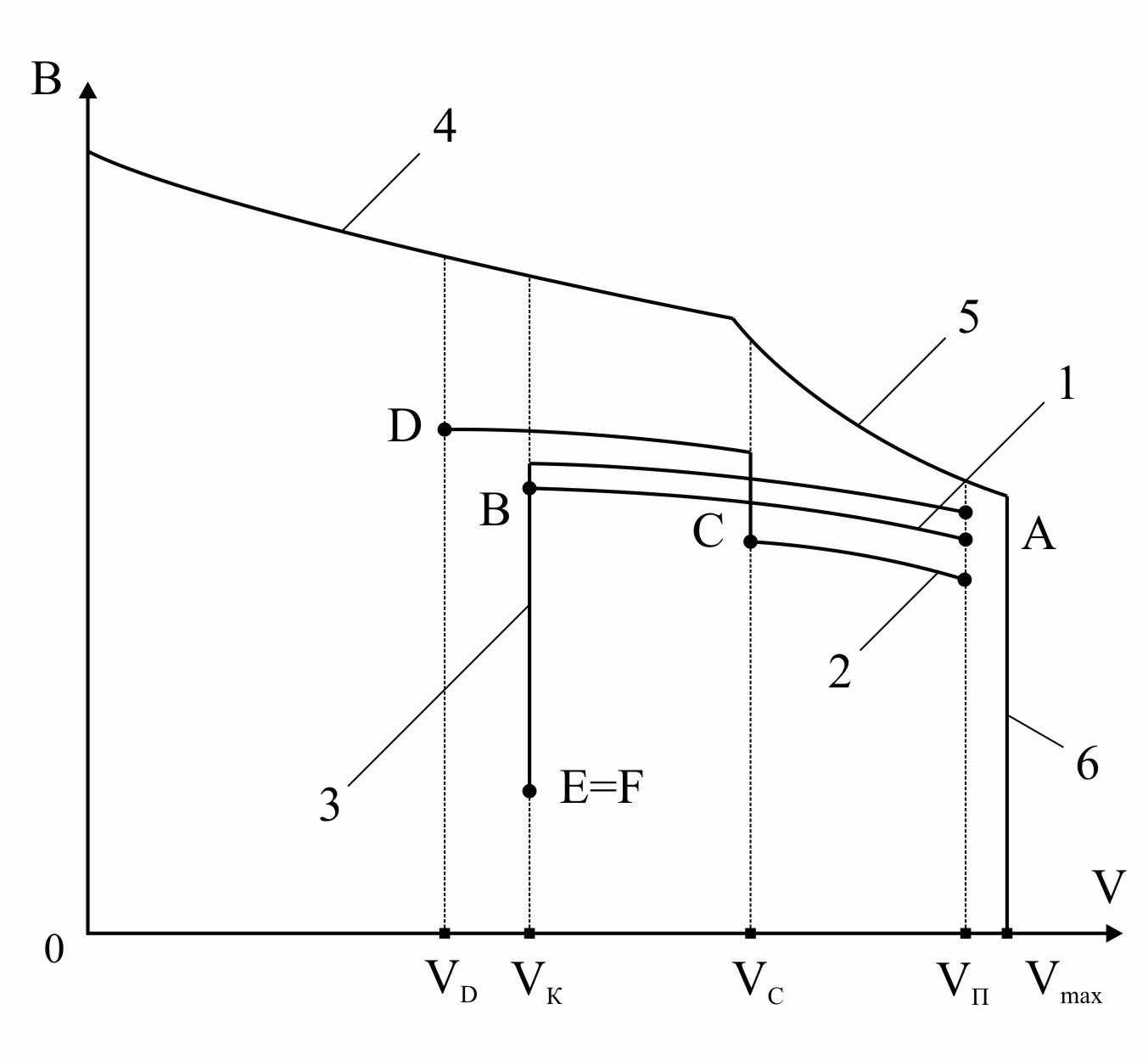 Рисунок 2 - Якісний вигляд гальмівних характеристик для варіантів зниження швидкості при існуючих системах керування
Рисунок 2 - Якісний вигляд гальмівних характеристик для варіантів зниження швидкості при існуючих системах керуванняЗ розглянутих трьох варіантів зниження швидкості з використанням тільки рекуперативного гальмування при існуючих системах керування вірогідними є другий та третій. Гальмування за першим варіантом, який дозволяє точно виконати графік, практично неможливе, оскільки вибір початкового значення гальмівної сили цілком покладено на машиніста. Машиніст, як правило, при діючих системах керування не має змоги з необхідною швидкодією вирахувати потрібне значення гальмівного зусилля.
Дослідження авторів показали, що для типових значень ухилів та середньої маси поїзда 3268 т значення
 для третього варіанту зниження швидкості (характеристика 3, рис. 1 а, б) складає 7,2% від графікового часу руху на даній ділянці
для третього варіанту зниження швидкості (характеристика 3, рис. 1 а, б) складає 7,2% від графікового часу руху на даній ділянці  , а
, а  для другого варіанту зниження швидкості руху (характеристика 2, рис. 1 а), б) в середньому складає 8%.
для другого варіанту зниження швидкості руху (характеристика 2, рис. 1 а), б) в середньому складає 8%.Оскільки при використанні існуючих систем автоматичного керування практично неможливе точне забезпечення гальмування на заданій ділянці за графіком, тому необхідно для вирішення задачі підвищення ефективності використання рекуперативного гальмування функцію вибору уставки гальмівної сили (струму рекуперації) передати від машиніста до системи керування, тобто забезпечити повністю автоматичне керування процесом рекуперації при цьому.
При автоматичному формуванні гальмівної характеристики
на ділянці довжиною з графіковим часом руху для зменшення швидкості від  до можливо декілька варіантів (рис. 3 а), б):
до можливо декілька варіантів (рис. 3 а), б):- Як і при діючих системах керування гальмівне зусилля, розраховане в певному блоці удосконаленої системи змінюється таким чином, що поїзд рівномірно сповільнюється від початкової швидкості до кінцевої з
 .
.
- Початкове гальмівне зусилля має значення дещо менше, ніж для першого варіанту, тому поїзд уповільнюється з
 . В точці „В” шляху, для виконання початкових умов, система повинна скоригувати величину гальмівного зусилля таким чином, щоб швидкість зменшувалась більш інтенсивно, тобто
. В точці „В” шляху, для виконання початкових умов, система повинна скоригувати величину гальмівного зусилля таким чином, щоб швидкість зменшувалась більш інтенсивно, тобто  . В точці „С” поїзд буде мати швидкість
. В точці „С” поїзд буде мати швидкість  , яка буде меншою від швидкості у цій же точці шляху за першим варіантом. Тому для дотримання графіку руху та виконання обмеження, необхідно в точці „С” зменшити гальмівну силу таким чином, щоб у точці „D” поїзд мав швидкість
, яка буде меншою від швидкості у цій же точці шляху за першим варіантом. Тому для дотримання графіку руху та виконання обмеження, необхідно в точці „С” зменшити гальмівну силу таким чином, щоб у точці „D” поїзд мав швидкість  (рис. 3), а час .
(рис. 3), а час .
- Початкове гальмівне зусилля має значення дещо більше, ніж потрібно для реалізації рекуперативного гальмування з уповільненням
 , тому поїзд уповільнюється з . В точці „E” шляху, для виконання початкових умов, система повинна скоригувати величину гальмівного зусилля таким чином, щоб швидкість зменшувалась менш інтенсивно, тобто
, тому поїзд уповільнюється з . В точці „E” шляху, для виконання початкових умов, система повинна скоригувати величину гальмівного зусилля таким чином, щоб швидкість зменшувалась менш інтенсивно, тобто  . В точці „G” шляху поїзд буде мати швидкість
. В точці „G” шляху поїзд буде мати швидкість  , яка буде більшою від швидкості у цій же точці шляху за першим варіантом. Тому для дотримання графіку руху та виконання обмеження по швидкості необхідно в точці „G” шляху збільшити гальмівну силу таким чином, щоб у точці „D” поїзд мав швидкість (рис. 3), а час .
, яка буде більшою від швидкості у цій же точці шляху за першим варіантом. Тому для дотримання графіку руху та виконання обмеження по швидкості необхідно в точці „G” шляху збільшити гальмівну силу таким чином, щоб у точці „D” поїзд мав швидкість (рис. 3), а час .
Всі вказані три варіанти рекуперативного гальмування забезпечують виконання графіку руху (
) і дозволяють мати швидкість в кінці ділянки гальмування рівною заданому значенню .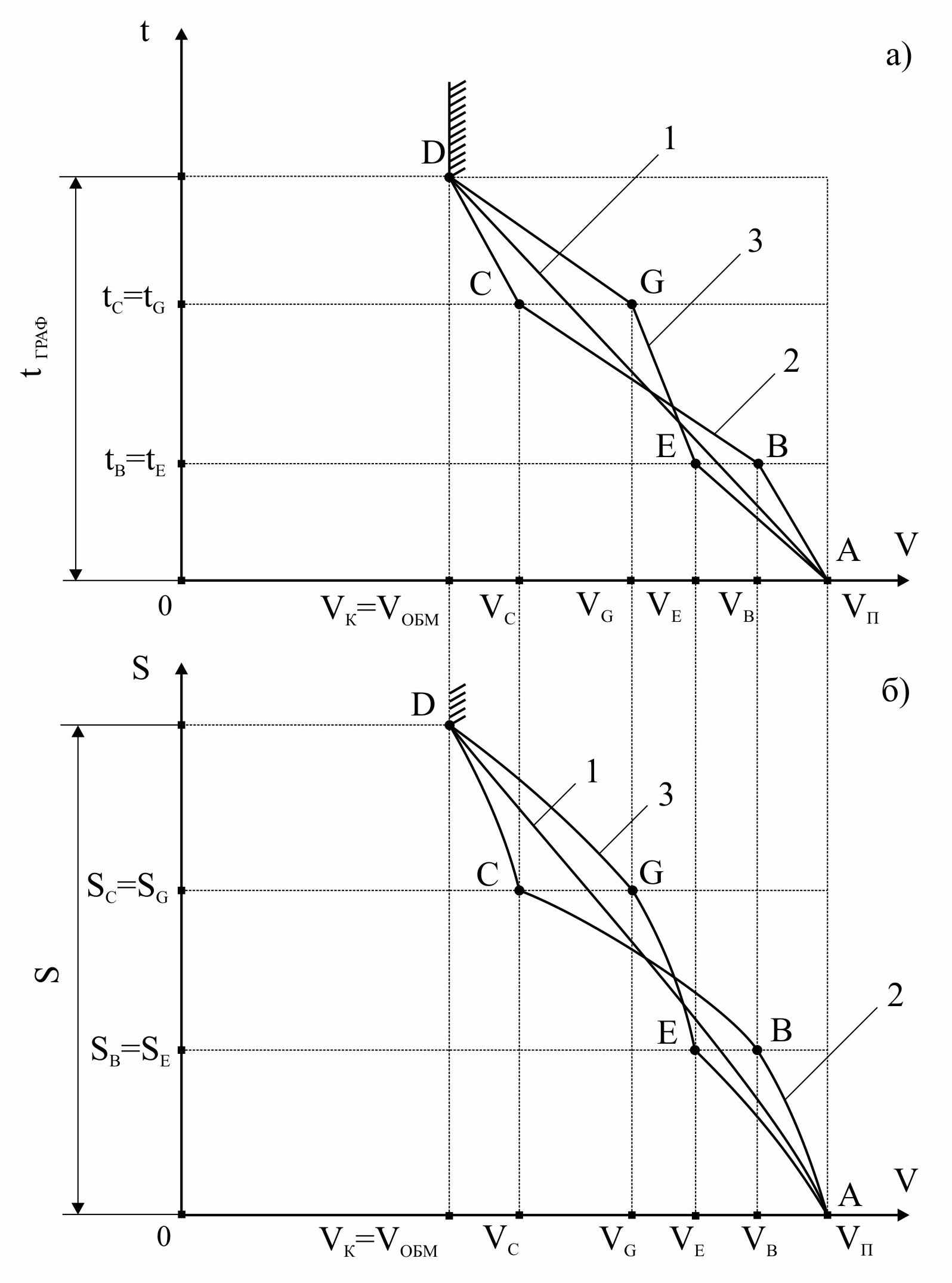
Рисунок 3 - Варіанти залежностей
 ,
,  при автоматичному формуванні
при автоматичному формуванні 
З урахуванням форми характеристик
,  (рис. 3) якісний вигляд гальмівних характеристик для розглянутих трьох варіантів зниження швидкості наведено на рис. 4: характеристика 1 –
(рис. 3) якісний вигляд гальмівних характеристик для розглянутих трьох варіантів зниження швидкості наведено на рис. 4: характеристика 1 –  ; характеристика 2 –
; характеристика 2 –  ; характеристика 3 – ,
; характеристика 3 – ,  .
.З рис. 4 видно, що найпростішим варіантом формування гальмівної сили при рекуперації у повністю автоматичному режимі є перший варіант. Також значення гальмівної сили на відрізках від
 до
до  та до для третього варіанту і значення гальмівної сили на відрізку від
та до для третього варіанту і значення гальмівної сили на відрізку від  до для другого варіанту при деяких значеннях маси поїзда та ухилу можуть виходити за обмеження (криві 4, 5, 6 на рис. 4) гальмівної характеристики електровозу, тоді як
до для другого варіанту при деяких значеннях маси поїзда та ухилу можуть виходити за обмеження (криві 4, 5, 6 на рис. 4) гальмівної характеристики електровозу, тоді як  за першим варіантом по умовам роботи буде знаходитись в межах діючих обмежень.
за першим варіантом по умовам роботи буде знаходитись в межах діючих обмежень.Таким чином, необхідно мати надійну систему автоматичного керування рекуперативним гальмуванням (САК РГ), яка, на відміну від діючих систем, повинна забезпечити з достатньою швидкодією та точністю розрахунок
для реалізації першого варіанту зниження швидкості ( на всій ділянці). Об’єктивно така система керування може бути розроблена з використанням сучасних мікроконтролерів.
на всій ділянці). Об’єктивно така система керування може бути розроблена з використанням сучасних мікроконтролерів.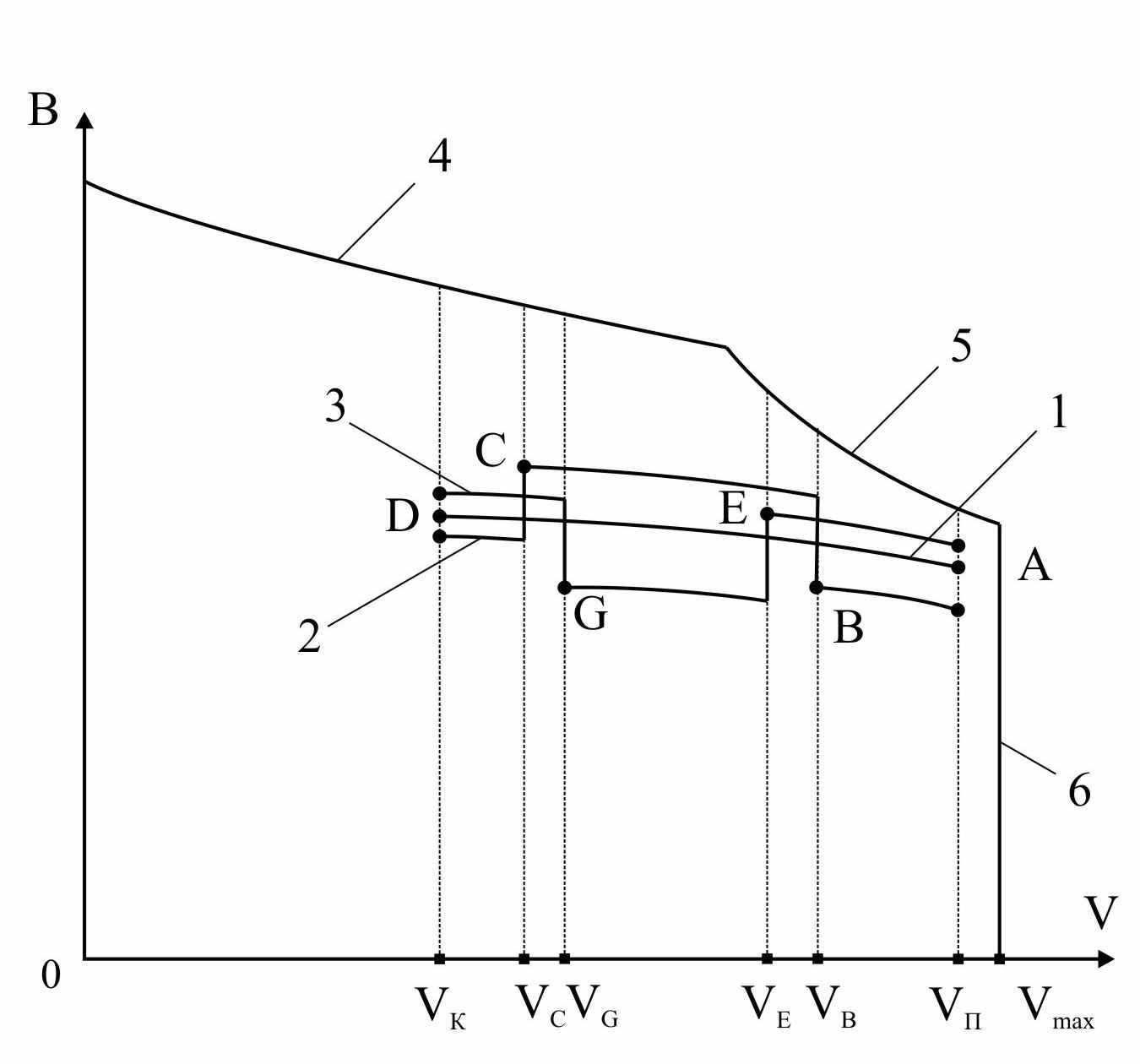
Рисунок 4 - Якісний вигляд гальмівних характеристик для варіантів зниження швидкості при автоматичному розрахункові
Висновки. Для підвищення ефективності рекуперативного гальмування в сучасних умовах роботи залізниць України необхідно розробити САК РГ, яка дозволятиме без участі машиніста формувати гальмівну характеристику з
на всій ділянці гальмування, забезпечуючи при цьому виконання графіку та безпеку руху. Роботи по розробці такої системи [2] ведуться в Дніпропетровському національному університеті залізничного транспорту ім. академіка В. Лазаряна.ЛІТЕРАТУРА
- Кірпа Г.М. Інтеграція залізничного транспорту України у європейську транспортну систему: Монографія. – Д.: Видавництво Дніпропетровського національного університету залізничного транспорту ім. академіка В. Лазаряна, 2004. – 248 с.
- Устименко Д.В. Деклараційний патент на винахід. Пристрій автоматичного керування рекуперативним гальмуванням електрорухомого складу постійного струму. Патент України №70566А. МПК 7 В60L7/10, B60L7/22, B60L15/20. Заяв. 09.12.2003р. Опубл. 15.10.2004р. Бюл. №10.
Стаття надійшла 15.04.2006 р.
Рекомендовано до друку
д.т.н., проф. Родькіним Д.Й.
Вісник КДПУ. Випуск 3/2006 (39). Частина 1.