
Рабочая программа для направления 550200 Автоматизация и управление Факультет автоматики и вычислительной техники ( автф )
| Вид материала | Рабочая программа |
- Рабочая программа для направления 550200 «Автоматизация и управление» испециальности, 131.97kb.
- Рабочая программа для специальности: 220400 Программное обеспечение вычислительной, 133.96kb.
- Рабочая программа для направления 550200 "Автоматизация и управление" Факультет, 107.35kb.
- Рабочая программа для направления 550200 "Автоматизация и управление", для специальности, 305.49kb.
- Образовательный стандарт по направлению бакалавриата 550200 [220200]«Автоматизация, 228.57kb.
- Рабочая программа для специальности 010502 Прикладная информатика (в экономике) Факультет, 106.16kb.
- Рабочая программа учебной дисциплины Локальные системы автоматизации и управления, 283.55kb.
- Образовательный стандарт по направлению 550200 «Автоматизация и управление» (Код оксо, 149.87kb.
- Программа для специальности 210100 "Управление и информатика в технических системах", 277.23kb.
- Программа для специальности 210100 "Управление и информатика в технических системах", 191.22kb.
Министерство образования Российской Федерации
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
УТВЕРЖДАЮ:
ДД
Декан АВТФ
_______________ Мельников Ю.С.
( подпись) ( фамилия )
___________________
( дата)
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ СИСТЕМ
Рабочая программа для направления
550200 - Автоматизация и управление
Факультет автоматики и вычислительной техники ( АВТФ )
Обеспечивающая кафедра - кафедра интегрированных компьютерных
систем управления
Курс - четвертый
Семестр - 7
Учебный план набора 1999 года с изменениями _________ года
Распределение учебного времени
| Лекции | ____48___ _ | часов(ауд.) |
| Лабораторные занятия | _______ __ | часов(ауд.) |
| Практические(семинарские) занятия | ____16 ____ | часов(ауд.) |
| Курсовой проект в ____семестре | ___________ | часов(ауд.) |
| Курсовая работа в ___семестре | ____ _____ | часов(ауд.) |
| Всего аудиторных занятий | ____64 ____ | часов |
| Самостоятельная (внеаудиторная) работа | ____48 ____ | часов |
| Общая трудоемкость | ____112____ | часов |
| Экзамен в _ _____ семестре | ___________ | |
| Зачет в _____7___ семестре | ___________ | |
| Дифзачет в __ ___ семестре | ___________ | |
2000 г.
Предисловие
Рабочая программа составлена на основе Государственного образовательного стандарта высшего профессионального образования по направлению 550200 - Автоматизация и управление, утвержденного Госкомвузом РФ в 1993 году; профессиональной образовательной программе ТПУ по данному направлению, утвержденной проректором ТПУ по учебной работе в 2000 году; учебного план направления для студентов приема 1999 г., а также на основе Примерной программы по курсу "Моделирование систем управления" для специальности 210100 - Управление и информатика в технических системах, утвержденной Главным управлением образовательно-профессиональных программ и технологий Госкомвуза РФ в 1995 году.
рассмотрена и одобрена на заседании обеспечивающей кафедры
_______интегрированных компьютерных систем управления___________
( наименование кафедры )
________________ 2000 г. , протокол № _____ .
( дата )
Разработчик
__доцент _ __ИКСУ___ ______________ _А._В. Воронин _
( должность) (кафедра) ( подпись ) ( И. О. Фамилия )
Зав. обеспечивающей кафедрой ИКСУ
___________________ _А._М._Малышенко_
( подпись ) ( И. О. Фамилия )
СОГЛАСОВАНА с кафедрой автоматики и компьютерных систем ________ 2000г.
Зав. кафедрой АиКС
___________________ _Г._П._Цапко _
( подпись ) ( И. О. Фамилия )
Рабочая программа СОГЛАСОВАНА с факультетом АВТ и СООТВЕТСТВУЕТ вышеуказанным нормативным документам.
Зав. выпускающей кафедрой ИКСУ ____________ _А. М. Малышенко__
( подпись ) ( И. О. Фамилия )
Данная рабочая программа предназначена для подготовки бакалавров по направлению 550200 - "Автоматизация и управление" на кафедре интегрированных компьютерных систем управления и кафедре автоматики и компьютерных систем факультета автоматики и вычислительной техники ТПУ.
Курс "Моделирование систем управления" входит в цикл общепрофессиональных дисциплин подготовки указанных специалистов. Он включен в учебные планы с целью усвоения студентами современных методов моделирования сложных, физически неоднородных систем, в частности, систем автоматического управления объектами различного назначения, а также в приобретении навыков использования систем автоматизированного моделирования таких объектов на ЭВМ в проектной и научно-исследовательской работе.
Изложение курса "Моделирование систем управления" базируется в основном на курсах "Математические основы кибернетики", "Высшая математика", "Теоретическая механика", “Теоретическая электротехника.
This working program is intended for preparing the bachelors on the direction 550200 - "Automation and control" on the chair of integrating computer managerial systems and chair of automatics and computer systems automations and computing machinery department of Tomsk polytechnic university.
Course "Simulation of control systems" falls general professional discipline of preparing the specified specialists into the cycle of. It is included to educational plans for the reason assimilations by students of modern methods of simulation of complex, physically lumpy systems, in particular, of automatic control systems by objects of different purpose, as well as for acquisition of skills of using the systems of automatic simulation of such objects on PC at design and research functioning.
Interpretation of course "Simulation of control systems" is based in the main on courses "Mathematical bases of cybernetics", "Higher mathmatics", "Theoretical mechanics", "Theoretical electrical engineering”.
1 ЦЕЛИ И ЗАДАЧИ УЧЕБНОЙ ДИСЦИПЛИНЫ
1.1. Цели преподавания дисциплины
В результате изучения дисциплины "Моделирование систем управления" студенты должны получить такую совокупность знаний и умений в области современных методов и средств моделирования систем различной физической природы, которые необходимы им для для успешного решения задач разработки, исследования и эксплуатации систем автоматического и автоматизированного управления техническими объектами, технологическими линиями и автономными техническими системами.
1.2. Задачи изложения и изучения дисциплины
Успешно изучивший дисциплину "Моделирование систем управления" студент должен
иметь представление:
- о принципах математического и имитационного моделирования автоматических систем управления;
- о методах получения и исследования математических моделей объектов различной физической природы;
знать и уметь:
- ставить задачу моделирования, выбирать структуру, а также алгоритмическую и программную реализацию имитационной модели сложного динамического объекта управления;
- получать математические модели динамики объектов с элементами различной физической природы и оценивать их адекватность;
- планировать машинные эксперименты, получать и правильно интерпретировать их результаты ;
иметь опыт:
- использования систем автоматизированного моделирования и исследования технических систем на ЭВМ.
Вышеуказанные цели преподавания и задачи изучения дисциплины "Моделирование систем управления" достигаются за счет совместной с преподавателями и другими студентами, а также индивидуальной познавательной деятельности студентов. С этой целью используются лекции и практические занятия, самостоятельная работа студентов по курсу; учебные пособия, автоматизированные обучающие системы и методические указания к практическим занятиям; комплекты домашних и контрольных заданий для проверки знаний студентов и другие методические разработки обеспечивающей данный курс кафедры ИКСУ.
Практические навыки при изучении "Моделирование систем управления" студент приобретает во время практических занятий и выполнения домашних заданий.
2 СОДЕРЖАНИЕ ТЕОРЕТИЧЕСКОГО РАЗДЕЛА ДИСЦИПЛИНЫ
2.1. Общие понятия теории моделирования (6 часов)
Предмет и задача курса. Задача моделирования. Моделирование как метод технической кибернетики. Методы моделирования - физическое, натурное, математическое, на ЭВМ, ЦВМ, гибридных вычислительных комплексах.
Основные положения теории подобия и подходы к построению математических моделей. Полнота модели. Адекватность модели. Классификация моделей по характеру и способам использования. Типовые математические модели. Непрерывно-детерминированные модели. Дискретно-детерминированные модели. Непрерывно-стохастические модели. Дискретно-стохастические модели. Обобщенные модели.
2.2. Топологические методы математического моделирования
динамических систем (12 часов)
Идеология топологических методов моделирования. Метод графов связей. Основные термины и определения графов связей. Физические интерпретации потоков и усилий, математических моделей компонентов.
Построение графов связей электрической схемы. Эквивалентные преобразования графа. Построение графа одномерной механической системы для поступательного и вращательного движений. Моделирование электромеханических систем. Получение математической модели графа в форме системы дифференциальных и алгебраических уравнений.
Причинные отношения в графе, правила определения причинности. Построение структурных схем по графу связей. Правило Мезона для получения передаточных функций. Пути и циклы в графе связей. Непосредственное применение правила Мезона к графу связей.
Метод обобщенных цепей Основные понятия и определения. Типовые компоненты механических цепей - твердые тела, кинематические узлы, динамические компоненты. Типовые компоненты силовых приводов и управляющих алгоритмов. Компонентные и топологические уравнения. Математические модели типовых компонентов для решения задач кинематики и динамики пространственных механизмов. Модели систем с элементами различной физической природы.
2.3. Численные методы моделирования динамических систем (14 часов)
Методы моделирования линейных динамических систем. Канонические формы математических моделей. Частотный метод, операторный метод, метод переменных состояния. Формирование численных моделей линейных систем в форме систем линейных алгебраических уравнений (СЛАУ). Особенности формирования на ЭВМ аналитических моделей. Алгоритмы моделирования: расчет частотных характеристик непрерывных и цифровых систем управления, расчет передаточных функций , формирование уравнений состояния.
Методы понижения порядка математических моделей динамических объектов. Адекватность математических моделей.
Численное моделирование динамических систем. Методы численного интегрирования - явные и неявные, одношаговые и многошаговые. Алгебраизация и линеаризация дифференциальных уравнений. Формирование матрицы Якоби. Алгоритмы численного интегрирования.
2.4. Имитационное моделирование систем управления (8 часов)
Суть имитационного моделирования. Основные требования к имитационной модели. Этапы построения имитационной модели. Построение концептуальной модели и ее формализация. Структура имитационной модели. Алгоритмизация модели системы и ее машинная реализация. Принципы построения моделирующих алгоритмов. Получение и интерпретация результатов моделирования. Построение имитационной модели системы управления подвижным объектом.
Статистическое моделирование на ЭВМ. Моделирование случайных воздействий.
Планирование машинных экспериментов с моделями систем. Обработка и анализ результатов моделирования.
2.5. Программные и технические средства моделирования систем (8 часов)
Системы автоматизированного моделирования и принципы их построения. Функциональные возможности современных систем автоматизированного моделирования. Структура алгоритмического и программного обеспечения задач моделирования и анализа в системах РЕМОС и CLASSIC. Принципы построения САПР РЕМОС. Работа в САПР РЕМОС и CLASSIC.
3 СОДЕРЖАНИЕ ПРАКТИЧЕСКОГО РАЗДЕЛА ДИСЦИПЛИНЫ
3.1.Тематика практических занятий ( 16 ч )
1. Построение графов связей электрических и механических систем.
2. Построение структурных схем по графам связей.
3. Применение правила циклов к графам связей.
4. Контрольная работа по топологическим методам математического моделирования.
5. Модели линейных объектов в операторной области.
6. Модели линейных объектов в частотной области.
7. Модели численного интегрирования.
8. Контрольная работа по моделям автоматизированного моделирования динамических систем.
4 ПРОГРАММА САМОСТОЯТЕЛЬНОЙ ПОЗНАВАТЕЛЬНОЙ
ДЕЯТЕЛЬНОСТИ
Самостоятельная работа студентов по дисциплине "Моделирование систем управления" планируется в объеме 48 часов и включает в себя проработку лекционного материала (18 часов), подготовку к практическим занятиям и контрольным работам (12 часов), сдача коллоквиумов (2 часа), самостоятельное изучение ряда вопросов учебного курса, которые не носят принципиального характера и могут быть изучены студентами самостоятельно (16 часов).
На самостоятельное изучение выносятся следующие вопросы:
Формы представления математических моделей многосвязных линейных динамических систем. Канонические формы уравнений состояния. Вычисление матричной экспоненты.
Решение СЛАУ. Итерационные методы. Проблема обусловленности, анализ ошибок. Численные методы решения нелинейных алгебраических уравнений.
Учет разреженности матрицы коэффициентов. Методы хранения разреженных матриц в памяти ЭВМ. Учет разреженности в алгоритмах решения СЛАУ.
5 ТЕКУЩИЙ И ИТОГОВЫЙ КОНТРОЛЬ РЕЗУЛЬТАТОВ
ИЗУЧЕНИЯ ДИСЦИПЛИНЫ
Для текущего контроля при изучении курса "Моделирование систем управления" используется рейтинговая система оценки знаний студентов. В течение каждого семестра студент может набрать 1000 баллов: 850 баллов в течение семестра и 150 баллов - при сдаче зачета. Принятая рейтинговая система учитывает посещаемость запланированных аудиторных занятий ( РПАЗ ), результаты коллоквиумов и контрольных работ ( РКР ) и активность на практических занятиях ( РАПЗ ). Таким образом, семестровый рейтинг студента
РС = РПАЗ + РКР + РАПЗ.
За посещение аудиторных занятий начисляется 3 балла за каждый академический час лекции и 5 балла за каждый академический час практического занятия, которые посетил студент. При посещении всех запланированных занятий в семестре студент получает 224 балла. За сдачу коллоквиумов и выполнение контрольных работ студент может получить максимум 626 баллов.
Кроме того, студент может “заработать” во время практических занятий дополнительные баллы, выполняя поставленные задачи. Максимальная оценка, которую может получить студент на одном практическом занятии - 5 баллов.
Студент получает “автоматический” зачет по дисциплине "Моделирование систем управления" при условии, что он сдал все коллоквиумы и выполнил все контрольные работы, получив за каждую работу не менее чем 50% от максимально возможного количества баллов и набрал в течении семестра не менее 600 баллов. Если количество баллов менее 600 но более 500 , то студент сдает зачет.
Форма зачета ( по билетам или без них, устно или письменно ) устанавливается лектором и сообщается студентам минимум за неделю. Максимальное количество баллов, которые студент может получить на зачете - 150. Зачет считается сданным, если студент получил на нем не менее 75 баллов. При меньшем количестве набранных баллов зачет по дисциплине не выставляется.
5 УЧЕБНО-МЕТОДИЧЕСКОЕ ОБЕСПЕЧЕНИЕ ДИСЦИПЛИНЫ
5.1. Перечень рекомендуемой литературы
О с н о в н а я
1. Системы автоматизированного проектирования: в 9-ти кн. Кн. 4. Математические модели технических объектов: Учебн. пособие для втузов / В.А.Трудоношин, Н.В.Пивоварова; под ред. И.П.Норенкова. - М.: Высшая школа, 1986.- 160с.
2. Тетельбаум И.М., Тетельбаум Я.И. Модели прямой аналогии. - М.: Наука, 1979. - 384с.
3. Советов Б.Я.,Яковлев С.А. Моделирование систем. - М.: Высшая школа, 1985. - 269с.
4. Имаев Д.Ч. и др. Анализ и синтез систем управления. - Информ.издат.центр Сургутского гос. универс.,1998. - 169с.
5. Корячко В.П. и др. Теоретические основы САПР: Учебник для втузов. - М.: Энергоатомиздат, 1987. - 400с.
6. Максимей И.В. Имитационное моделирование. - М.: Наука, 1988. - 187с.
7. Петерс Д.П. Изучение методики автоматизированного расчета систем автоматического управления в системе РЕМОС на персональном компьютере. Методические указания к выполнению лабораторных работ. - Томск: изд-во ТПУ, 1992. - 27с.
8. Веников В.А., Веников Т.В. Теория подобия и моделирования . М.: Высшая школа, 1998
Д о п о л н и т е л ь н а я
1. Применение метода графов связей в технике. Под ред. Кэрнопа Д. и Розенберга Р. - М.: Мир, 1973.
2. Гончаров В.И., Петерс Д.П., Вадутова Ф.А. Проектирование исполнительных систем роботов. - Томск: Изд-во ТПУ. - 96с.
3. Брамеллер А. и др. Слабозаполненные матрицы: Анализ электроэнергетических систем. Пер. с англ. - М.: Энергия, 1979. - 192с.
4. Огай В.С., Щербаков В.Н. Математическое моделирование процессов и систем. Конспект лекций. Томск, изд.ТПИ, 1987. - 57с.
5.2. Компьютерные программы
- Пакет прикладных программ "РЕМОС".
- Пакет прикладных программ "CLASSiC".
5.3. Контролирующие материалы
В комплект контролирующих материалов по дисциплине "Моделирование систем управления" входят :
- Экзаменационные билеты и набор экзаменационных контрольных задач.
2. Наборы вопросов и задач для внутрисеместрового контроля знаний студентов на контрольных работах и коллоквиумах.
Образцы контрольных задач и вопросов для коллоквиумов представлены в приложении.
Приложение к рабочей программе по курсу
“Моделирование систем управления”
Образцы вопросов к коллоквиуму по топологическим методам математического моделирования.
| Билет 1 1. Основные элементы графов связей и их деление на группы. 2. Как представляются 0 и 1 узлы ГС в структурной схеме. | Билет 2. 1. Эквивалентные преобразования графов связей. 2. Сформулировать правило циклов. |
| Билет 3. 1. Дать определение шести основным переменным графов связей. 2. Правила расчета определителя полного и сокращенного графа при использовании правила циклов. | Билет 4. 1. Интерпретация шести основных переменных графов связей для электрических систем. 2. Правила выделения циклов в ГС. |
| Билет 5 1. Интерпретация шести основных переменных графов связей для механических систем (поступательное движение). 2. Правила расстановки причинных отношений в графах связей. | Билет 6 1. Интерпретация шести основных переменных графов связей для механических систем (вращательное движение). 2. Алгоритм получения математических моделей графов связей в форме системы уравнений. |
| Билет 7 1. Интерпретация основных элементов графов связей для электрических систем. 2. Правила выбора основных путей в графе при получении передаточных функций методом циклов. | Билет 8 1. Интерпретация основных элементов графов связей для механических систем. 2. Как представляются гираторы и трансформаторы в структурной схеме. |
Образцы задач к контрольной работе по топологическим методам математического моделирования.
| Билет 1 Для заданной схемы составить граф модели, расставить причинные связи, построить структурную схему и расчитать по ней передаточную функцию между входным усилием и током в r2 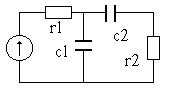 | Билет 2 Для заданной схемы составить граф модели, расставить причинные связи, используя правило циклов расчитать по графу передаточную функцию между входным усилием и током в r1 |
| Билет 3 Для заданной схемы составить граф модели, расставить причинные связи, построить структурную схему и расчитать по ней передаточную функцию между входным усилием и током в c1 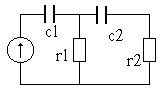 | Билет 4 Для заданной схемы составить граф модели, расставить причинные связи, используя правило циклов расчитать по графу передаточную функцию между входным усилием и током в r1 |
| Билет 5 Для заданной схемы составить граф модели, расставить причинные связи, построить структурную схему и расчитать по ней передаточную функцию между входным усилием и током в r2 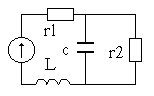 | Билет 6 Для заданной схемы составить граф модели, расставить причинные связи, используя правило циклов расчитать по графу передаточную функцию между входным усилием и током в L |
| Билет 7 Для заданной схемы составить граф модели, расставить причинные связи, построить структурную схему и расчитать по ней передаточную функцию между входным усилием и током в с. 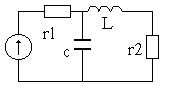 | Билет 8 Для заданной схемы составить граф модели, расставить причинные связи, используя правило циклов расчитать по графу передаточную функцию между входным усилием и током в L |
Образцы задач для контрольной работы по моделям автоматизированного моделирования динамических систем
| Билет 1 Для заданной структурной схемы построить схему моделирования, провести нумерацию узлов, сформировать модель  . .Записать матрицу  в плотной форме. в плотной форме.По операторной модели сформировать матрицу  для анализа в частотной области. для анализа в частотной области.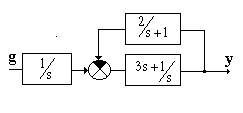 Записать явные и неявные формулы численного интегрирования методом Эйлера дифференциального уравнения  | Билет 2 Для заданной структурной схемы построить схему моделирования, провести нумерацию узлов, сформировать модель .Записать матрицу в плотной форме.По операторной модели сформировать матрицу для анализа в частотной области.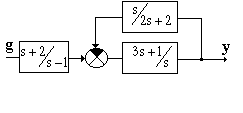 Записать явные и неявные формулы численного интегрирования методом Эйлера дифференциального уравнения  |
| Билет 3 Для заданной структурной схемы построить схему моделирования, провести нумерацию узлов, сформировать модель .Записать матрицу в плотной форме.По операторной модели сформировать матрицу для анализа в частотной области.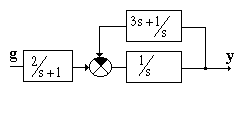 Записать явные и неявные формулы численного интегрирования методом Эйлера дифференциального уравнения  | Билет 4 Для заданной структурной схемы построить схему моделирования, провести нумерацию узлов, сформировать модель .Записать матрицу в плотной форме.По операторной модели сформировать матрицу для анализа в частотной области.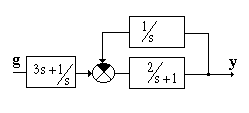 Записать явные и неявные формулы численного интегрирования методом Эйлера дифференциального уравнения  |
Образцы вопросов к коллоквиуму по методам имитационного моделирования.
| Билет 1 1. Метод математического моделирования. Суть метода, его достоинства и недостатки. 2. Указать три основные этапа имитационного моделирования сложной системы. Дать характеристику каждого этапа | Билет 2 1. Имитационное моделирование. С чем связана необходимость построения имитационных моделей. 2. Понятие статистического моделирования. Цель и сущность статистического моделирования. |
| Билет 3 1. Аналитическое моделирование. Суть метода, его достоинства и недостатки. 2. Области применения метода статистического моделирования. В чем состоит идея применения метода статистического моделирования для решения детерминированных задач. Пример. | Билет 4 1. Методы исследования аналитических моделей. Их достоинства и недостатки. 2. Что имеют в виду, когда говорят "Закон больших чисел". Что он определяет. В чем смысл центральной предельной теоремы. |
| Билет 5 1. Понятие сложной системы. Свойства сложных систем. 2. Основные способы генерации случайных чисел. Их достоинства и недостатки. | Билет 6 1. Определение имитационного моделирования. Преимущества и недостатки имитационного моделирования перед другими видами моделирования. 2. Дать описание методов моделирования на основе "принципа  " и "принципа " и "принципа  ". Для исследования каких систем применяются тот и другой методы. ". Для исследования каких систем применяются тот и другой методы. |
| Билет 7 1. Задачи, решаемые методами имитационного моделирования. 2. Планирование машинного эксперимента. Этапы стратегического и тактического планирования. Какие цели преследуются на каждом из этих этапов. | Билет 8 1. Основные критерии целесообразности применения метода ИМ по сравнению с аналитическим и физическим моделированием. 2. Понятие сложной системы. Свойства сложных систем. |
| Билет 9 1. Классификация математических моделей (по степени изменяемости во времени, по степени определенности поведения модели, по характеру течения модельного времени). 2. Перечислить задачи, которые решаются при имитационном моделированиии систем на этапе алгоритмизации модели и ее машинной реализации. Дать краткую характеристику каждой задачи. | Билет 10 1. Для описания каких объектов могут быть использованы непрерывно-детерминированные и дискретно-детерминированные модели. Приведите примеры таких объектов. 2. Перечислить задачи, которые решаются на этапе получения и интерпретации результатов моделирования. Дать краткую характеристику каждой задачи. |